اس پوسٹ میں ہم یہ جاننے جارہے ہیں کہ سروو موٹر کیا ہے ، یہ کس طرح کام کرتا ہے ، مائکروکینٹرلر کے ساتھ انٹرفیس کیسے کریں اور اس موٹر کو دوسری موٹروں سے کس طرح خصوصی بناتے ہیں۔
الیکٹرانکس کا جوش و جذبہ ہونے کے ناطے ہم کئی طرح کی موٹروں کو دیکھ سکتے ہیں ، یہاں ہم ایک خاص قسم کی موٹر کو دیکھیں جس کو सर्वो موٹر کہتے ہیں۔
امدادی موٹر کیا ہے؟
امدادی موٹر یا صرف امدادی موٹر ایک خاص قسم کی موٹر ہے جو پوزیشن ، سرعت اور رفتار پر عین مطابق کنٹرول کے لئے ڈیزائن کی گئی ہے۔ دیگر تمام اقسام کی موٹر کے برعکس ، امدادی صرف 180 ڈگری دو جہتی گھوم سکتی ہے۔ اس میں میکانکی گیئرز اور اسٹاپپر موجود ہیں جو امدادی کی کونیی گھومنے والی حد کو محدود کرتے ہیں۔
عام امدادی موٹر:

سرو موٹرز روبوٹکس ، سی سی ٹی وی کیمرے ، آر سی کاروں ، کشتیاں ، کھلونا ہوائی جہاز وغیرہ میں استعمال کی جاتی ہیں سرووس استعمال کیے جاتے ہیں جہاں ہمیں گھومنے والی حرکت کو جاری رکھنے کی ضرورت نہیں ہوتی ہے ، لیکن ایک مخصوص پوزیشن میں لاک ہوجاتا ہے یا چلنے والی کونیی حد کے اندر کچھ بوجھ کنٹرولڈ رفتار میں منتقل ہوتا ہے۔
امدادی صرف دوسری اقسام کی طرح موٹر نہیں ہوتا ہے ، لیکن یہ ایک ماڈیول ہے ، جس میں عام سی ڈی / اے سی موٹر ، گیئرز کا ایک گروپ ، کنٹرول الیکٹرانکس اور آراسی نظام شامل ہوتا ہے۔ آئیے تفصیل کے ساتھ ہر ذکر شدہ مرحلے پر نگاہ ڈالتے ہیں۔
ڈی سی / اے سی موٹر جو سروکو ماڈیول پر کام کرتی ہے وہ برش یا برش موٹر ہوسکتی ہے ، بیشتر شوق پر servos DC موٹر استعمال ہوتا ہے اور صنعتی ایپلی کیشنز میں AC موٹرز کا استعمال ہوتا ہے۔ موٹر امدادی کو گھماؤ ان پٹ فراہم کرتی ہے۔ امدادی کے اندر موٹر کئی سو RPM پر گھومتی ہے اور آؤٹ پٹ گھومنے والے اپنے RPM سے تقریبا or 50 یا اس سے زیادہ گنا کم ہوتے ہیں۔
اگلا مرحلہ گیئر اسمبلی ہے ، جو کونیی گردش اور امدادی کی رفتار کو کنٹرول کرتا ہے۔ گیئر کسی بھی پلاسٹک یا دھات سے بنایا جاسکتا ہے اس پر منحصر ہے کہ بوجھ کتنا بڑا ہے۔ عام طور پر DC موٹریں تیز RPM پر چلائی جاتی ہیں اور کم ٹارک گیئر اسمبلی اضافی RPM کو torque میں تبدیل کردے گی۔ اس طرح ایک چھوٹی موٹر بہت زیادہ بوجھ سنبھال سکتی ہے۔
اگلا مرحلہ کنٹرول الیکٹرانکس ہے جو موٹر کی گردش کو کنٹرول کرنے کے لئے MOSFETs اور IC کی تشکیل کرتا ہے۔ ایکٹیو ایٹر کی موجودہ حیثیت کا سراغ لگانے کے لئے امدادی موٹروں میں رائے کا نظام ہمیشہ موجود رہتا ہے۔
سرووس میں عام طور پر ایک آراء اجزا ایک پوٹینومیٹر ہوتا ہے ، جو گھومنے والی ایکچیوٹر سے براہ راست جڑا ہوتا ہے۔ پوٹینومیٹر وولٹیج ڈیوائڈر کا کام کرتا ہے جو کنٹرول الیکٹرانکس کو کھلایا جاتا ہے۔ اس آراء سے الیکٹرانکس کو موٹر کو دی جانے والی طاقت کی مقدار کا تعین کرنے میں مدد ملتی ہے۔
اگر کسی خارجی قوت نے پریشان ہونے کی کوشش کی تو ایک مقررہ پوزیشن میں موجود ایک سرو موٹر اپنی موجودہ حیثیت سے ہچکچاہٹ محسوس کرے گی۔ آراء کا نظام موجودہ پوزیشن پر نظر رکھتا ہے اور موٹر کو بیرونی پریشانی کے خلاف طاقت دیتا ہے۔
مذکورہ بالا منظرنامہ ایک ہی ہے جب سروو اپنا محرک منتقل کرے۔ کنٹرول سسٹم بیرونی طاقت کو معاوضہ دے گا اور عزم کی رفتار میں منتقل ہوگا۔
اب تک آپ سرو موٹر اور اس کے کام کرنے کے طریقہ کار کے بارے میں تھوڑا سا جانتے ہو گے۔ آئیے دیکھتے ہیں کہ مائکروکنٹرولر کا استعمال کرتے ہوئے सर्वो موٹروں کو کیسے کنٹرول کیا جائے۔
امدادی موٹرز میں دیگر موٹرز کے برعکس 3 ٹرمینلز ہیں جن میں 2 ٹرمینلز ، دو سپلائی (5V برائے برائے نام) اور ایک کنٹرول سگنل کے لئے ہے۔ تاریں ٹرمینلز کی آسانی سے شناخت کے ل for رنگین ہیں۔
servos کے کنٹرول سگنل 50Wz تعدد پر PWM ہیں۔ سگنل کی نبض کی چوڑائی ایکچواٹر بازو کی پوزیشن کا تعین کرتی ہے۔ ایک عام شوق سرو موٹر 1 سے 2 ملی سیکنڈ پلس کی چوڑائی سے چلتا ہے۔
1 ایم ایس پلس چوڑائی کنٹرول سگنل کا اطلاق کرنے سے ایکچوایٹر 0 ڈگری پوزیشن پر رہے گا۔ 2 ایم ایس پلس چوڑائی کنٹرول سگنل کا اطلاق کرنے سے 180 ڈگری پوزیشن حاصل ہوگی۔ 1-2 ایم ایس کے درمیان سگنل لگانے سے ایکچیوٹر 0-180 ڈگری زاویہ میں رہتا ہے۔ نیچے دی گئی شبیہہ کے ذریعہ اس کو بہتر طور پر سمجھا جاسکتا ہے۔

اب تک آپ سمجھ چکے ہوں گے کہ پلس کی چوڑائی ماڈلن (پی ڈبلیو ایم) کے ذریعہ ایک سروو کو کس طرح کنٹرول کیا جاتا ہے۔
آئیے یہ سیکھتے ہیں کہ اردوینو کے ساتھ سرو موٹر کو انٹرفیس کرنے کا طریقہ۔
سرکٹ ڈایاگرام:

وائرنگ آسان اور خود وضاحتی ہے۔ اگر آپ بڑی امدادی موٹر استعمال کررہے ہیں تو آپ کو بیرونی بجلی کی فراہمی کی ضرورت ہے۔ اگر آپ ارڈوینو پاور سپلائی سے بجلی حاصل کرنے کی کوشش کرتے ہیں تو آپ کمپیوٹر پر USB پورٹ کو زیادہ سے زیادہ لوڈ کرنا شروع کردیں گے۔
اگر آپ کے پاس امدادی نسخہ ہے جو مضمون کے شروع میں بیان ہوا ہے ، تو آپ اسے آرڈینو 5 وی سپلائی سے طاقت دے سکتے ہیں ، جو مصنف کی پروٹو ٹائپ میں بھی دکھایا گیا ہے۔
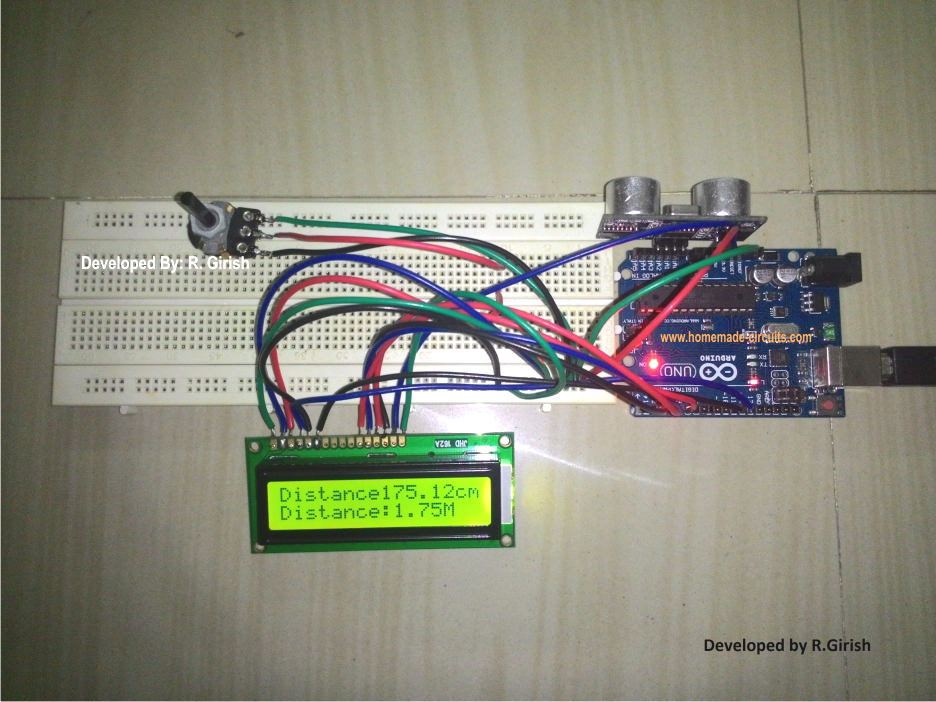
مصنف کی پروٹو ٹائپ:

آرڈینو کو سنبھالنے کے لئے امدادی لائبریری کی ضرورت ہے ، اس سے ہمارا کام آسان ہوگیا اور یہ پہلے ہی اردوینو IDE میں ہے۔
پروگرام:
//--------Program developed by R.Girish--------//
#include
Servo motor
int pos = 0
int t=10
void setup()
{
motor.attach(7)
}
void loop()
{
A:
pos=pos+1
motor.write(pos)
delay(t)
if(pos==180) { goto B}
goto A
B:
pos=pos-1
motor.write(pos)
delay(t)
if(pos==0) { goto A}
goto B
}
//--------Program developed by R.Girish--------//
مذکورہ پروگرام ایککٹیوٹر کو 0 سے 180 ڈگری دائیں اور 180 سے 0 ڈگری بائیں اور سائیکل کو دہراتا ہے۔ اس سروو کی جانچ کے لئے ایک آسان پروگرام ہے جسے آپ اپنی مرضی کے مطابق ایپلی کیشنز کے ل your اپنا کوڈ لکھ سکتے ہیں۔
پچھلا: دو پائپ واٹر پمپ والو کنٹرولر سرکٹ اگلا: موٹرسائیکل وولٹیج ریگولیٹر وائرنگ کو سمجھنا