خاص طور پر روبوٹک ٹکنالوجی میں ٹیکنالوجیز کی ترقی کے ساتھ ، بہت ساری ایپلی کیشنز میں روبوٹ غالب ہیں۔ ان میں سے کچھ انتہائی خطرناک قسم کے اور مضر علاقوں کے ہیں۔ فوجی اور جنگ کے میدان کی ایپلی کیشنز اب کچھ اہم اور پیچیدہ کاموں میں اپنے روبوٹ کے استعمال میں اضافہ کررہی ہیں۔ اپنے ایک مضمون میں ، میں نے فوجی کارروائیوں میں روبوٹ کے بطور جاسوس استعمال کو بیان کیا ہے۔ اب ، اگر دفاع کے لئے کوئی ضرورت پیش آئے روبوٹک گاڑی یا روبوٹ کا حملہ؟ اسی جگہ پر حملے کے طریقہ کار سے لیس روبوٹ کی ضرورت آجاتی ہے۔ اس کی ایک مثال لیزر گن والی روبوٹک گاڑی ہے۔

RF لیزر بیم کے انتظام کے ساتھ روبوٹک گاڑی کو کنٹرول کرتا ہے
اس طرح کا روبوٹ بنیادی طور پر فوجی کارروائیوں میں بھی استعمال ہوتا ہے اور ٹریفک پولیس بھی چلتی گاڑیوں کی رفتار کا پتہ لگانے کے لئے استعمال کرتی ہے۔
لیزر گنوں کے ساتھ روبوٹس کے بارے میں تفصیلات پر جانے سے پہلے ، ہمیں ایک ہتھیار کے طور پر لیزر کی فوری تفہیم حاصل ہوجائے۔
لیزر (حوصلہ افزائی اخراج کے ذریعہ لائٹ یمپلیفیکیشن) بیم ایک عام سمت بلب کے برعکس ایک غیر دشاتی سختی سے مرکوز روشنی ہے۔ یہ مطابقت پذیر گرت اور گرفتوں پر مشتمل ہے ، یعنی لہریں ایک دوسرے کے ساتھ مداخلت نہیں کرتی ہیں۔ یہ ایک عام بلب لائٹ سے 1000 سے 1 ملین گنا زیادہ کے آرڈر کی بہت زیادہ طاقت کی ایک مضبوط مرکوز روشنی پیدا کرتا ہے۔ یہ ایک ایسا آلہ ہے جو کافی مقدار میں انرجی پمپ کرکے فوٹون کے اخراج اور جذب کو کنٹرول کرتا ہے۔ اس میں ، فوٹونز کے منبع کو روشنی کی روشنی میں بڑھا دیا جاتا ہے۔ ان لیزرز کی طول موج میں مختلف اسپیکٹرم جیسے مرئی ، اورکت اور بالائے بنفشی میں مختلف ہے۔
لیزر کے پیچھے کا اصول تین چیزوں کے گرد گھومتا ہے جو جذب ، خود بخود اخراج اور محرک اخراج ہیں۔ فوٹون سے کافی مقدار میں توانائی ایٹم کے ساتھ تعامل کرتی ہے ، جس کی وجہ سے ایٹم کم توانائی کی ریاست سے توانائی کی اعلی حالت میں کود پڑتا ہے۔ یہ ایٹم خود بخود اخراج کے نام سے ایک فوٹون خارج کرکے کم توانائی کی حالت میں پڑتا ہے۔ حوصلہ افزا اخراج میں مصنوعی ذرائع سے ایٹم سے توانائی کا اخراج ہوتا ہے۔ لہذا فوٹون پرجوش ایٹم کے ساتھ تعامل کرتا ہے ، واقعی فوٹوون کی طرح ہی توانائی اور پولرائزیشن ہے۔
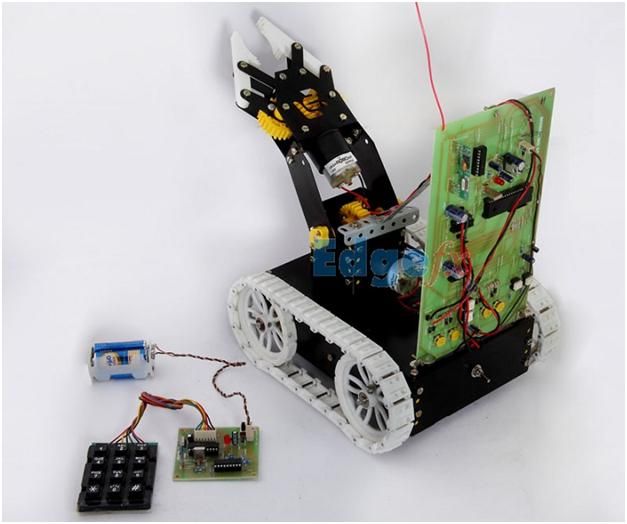
اب ہم روبوٹ کے ہارڈ ویئر پارٹس پر ایک نظر ڈالیں
- بنیاد: اس طرح کے روبوٹ کی بنیاد کسی بھی مکعب جسم کی ہوسکتی ہے جس میں پہیے اس کی نقل و حرکت سے منسلک ہوتے ہیں۔
- ڈی سی موٹر: روبوٹ موٹر سائیکل ڈرائیوروں کے ذریعہ چلنے والی دو DC موٹروں پر مشتمل ہے اور روبوٹ کو مطلوبہ حرکت فراہم کرتا ہے۔
- کنٹرول یونٹ: روبوٹ کی تحریک کو RF مواصلات ماڈیول کا استعمال کرتے ہوئے کنٹرول کیا جاتا ہے۔ ٹرانسمیٹر میں پش بٹن ، مائکروکنٹرولرز ، ایک ڈویکڈر ، اور ایک آریف ٹرانسمیٹر ہوتا ہے جبکہ روبوٹ پر سرایت کرنے والا وصول کنندہ یونٹ کو کنٹرول کرنے کے لئے ایک انکوڈر اور آر ایف وصول کنندہ ماڈیول پر مشتمل ہوتا ہے۔ روبوٹک تحریک .
- ایک لیزر گن: روبوٹ پر ایک لیزر گن لگائی گئی ہے جو روبوٹ کا بنیادی کام انجام دیتی ہے۔
روبوٹ ورکنگ میں جھانکنے والا
روبوٹ مطلوبہ سمت میں جاتے ہوئے لیزر گن سے ایک مضبوط لائٹ بیم گولی مار دیتی ہے جو یا تو ہدف کو نقصان پہنچا سکتی ہے یا ہدف کا پتہ لگانے کے لئے صرف جگہ پیدا کرتی ہے۔ LASER کو توانائی کے کچھ ذرائع سے کارفرما کرنے کی ضرورت ہے۔ بنیادی لیزر قلم کا استعمال کرتے ہوئے ایک سادہ پروٹوٹائپ ڈیزائن میں ، ڈیوائس کو ٹرانجسٹر کے ذریعہ کارفرما کیا جاتا ہے جو سوئچ کی حیثیت سے کام کرتا ہے۔ ٹرانجسٹر مائکروکینٹرلر سے کم منطق سگنل وصول کرتا ہے اور اس کی حالت خراب ہے ، جس سے لیزر ماڈیول 5 V بجلی کی فراہمی سے براہ راست منسلک ہوتا ہے۔

ٹرانجسٹر کے ذریعہ چلنے والا لیزر گن انورٹر کے طور پر کام کر رہا ہے
روبوٹ کو کنٹرول کرنا
روبوٹ کی تحریک کو کنٹرول کرنے کے لئے ، موٹروں کے آپریشن کو کنٹرول کرنے کی ضرورت ہے۔ یہ موٹر ڈرائیوروں کے ایک RF کنٹرول آپریشن کا استعمال کرتے ہوئے کیا جاسکتا ہے۔ احکامات تقریبا 200 میٹر کے فاصلے پر یونٹ پر RF ٹرانسمیٹر کا استعمال کرتے ہوئے منتقل ہوتے ہیں اور موٹروں کو چلانے کے لئے آریف وصول کنندہ کے ذریعہ موصول ہوتے ہیں۔
ٹرانسمیٹر یونٹ کئی پش بٹنوں پر مشتمل ہوتا ہے جو روبوٹ کو کسی بھی مطلوبہ سمت میں منتقل کرنے کے لئے کمانڈ سوئچ کا کام کرتے ہیں۔ پش بٹن کو مائکروکانٹرولر کے ساتھ انٹرفیس کیا گیا ہے ، جس کا پروگرام ان پٹ بٹن ان پٹ پر مبنی متوازی شکل میں ڈیٹا کو انکوڈر پر بھیجنے کا پروگرام ہے۔ انکوڈر اس متوازی ڈیٹا کو سیریل شکل میں بدلتا ہے اور یہ سیریل ڈیٹا کسی اینٹینا کے ذریعہ آر ایف ٹرانسمیٹر ماڈیول کا استعمال کرتے ہوئے منتقل ہوتا ہے۔

ٹرانسمیٹر سیکشن دکھا رہا ہے بلاک ڈایاگرام
وصول کنندہ یونٹ ایک RF وصول کنندہ ماڈیول پر مشتمل ہوتا ہے جو ماڈیولڈ سگنل وصول کرتا ہے اور اسے مایوس کرتا ہے۔ کوٹواچک سیریل شکل میں مسمار شدہ سگنل وصول کرتا ہے اور اسے متوازی شکل میں تبدیل کرتا ہے۔ مائکروکنٹرولر سگنل وصول کرتا ہے اور اسی کے مطابق موٹر ڈرائیور کو کنٹرول کرتا ہے۔ LM293D میں استعمال ہونے والا موٹر ڈرائیور جو ایک وقت میں 2 موٹروں کو کنٹرول کرسکتا ہے۔

بلاک ڈایاگرام وصول کنندہ سیکشن دکھا رہا ہے
اس طرح آریف مواصلات کا استعمال کرتے ہوئے ہم روبوٹ کو کنٹرول کرسکتے ہیں۔
مذکورہ بالا تفصیل میں ، میں نے ایک لیزر بیم والی روبوٹک گاڑی کی ایک عام پروٹو ٹائپ کے بارے میں ایک مختصر خیال دیا ہے۔ حقیقی زندگی کی ایپلی کیشنز میں ، عام طور پر دور دراز مقامات سے روبوٹ کو کنٹرول کرنے کے لئے جی ایس ایم یا ڈی ٹی ایم ایف جیسے لمبی دوری کے مواصلاتی نظام استعمال کیے جاتے ہیں۔
لیزر گن کے ساتھ روبوٹک گاڑی کی 3 درخواستیں:
- ہدف کا پتہ لگانا : روبوٹک گاڑی نشانے پر جگہ پیدا کرنے کے لئے لیزر بیم کا استعمال کرسکتی ہے ، جیسے کہ یہ آسانی سے نظر آتی ہے اور اسے نشانہ بنایا جاسکتا ہے۔ ایک مثال ایئر بورن لیزر ہے۔
- ہدف کی تباہی : ایک مضبوط لیزر بیم 95GHz فریکوئنسی کے آرڈر سے انسانی جسم میں جلن کا سبب بن سکتا ہے کیونکہ اس کی جلد میں 1/64 تک گھس جاتی ہےویںایک انچ اور بیم توانائی جسم میں پانی کے انووں کو گرم کرسکتی ہے۔ اس کی ایک مثال ریاستہائے متحدہ امریکہ کے ذریعہ تیار کردہ فعال انکار نظام ہے۔
- ہدف کی حد تلاش کرنے والا اور رفتار کا پتہ لگانا : روبوٹک گاڑی سے لیزر بیم کو لیزر لائٹ ریفلیکشن کے اصول کے ذریعہ ہدف کی حد معلوم کرنے کے لئے استعمال کیا جاسکتا ہے اور ایک بار جب رینج مل جائے تو ہدف کی رفتار کا بھی اندازہ لگایا جاسکتا ہے۔
لہذا اب ہمارے پاس روبوٹس کے بارے میں ایک مختصر خیال ہے کہ وہ ایک ہدف پکڑنے والے اور ڈسیلٹر استعمال کرتا ہے۔ کیا اس کا محض فوج کے علاوہ عام عوام کے لئے بھی کوئی فائدہ ہے؟ سوچو اور جواب دو۔