اس پوسٹ میں ہم انکیوبیٹر موٹر میکانزم کو چلانے کے لئے ایک ریورس فارورڈ ٹائمر سرکٹ سیکھتے ہیں۔ اس خیال کی درخواست مسٹر انوار نے کی تھی
تکنیکی خصوصیات
میں انڈونیشیا سے ہوں ..... مجھے ہائی ٹورک موٹر (کار میں DC موٹر پاور ونڈو) والے انکیوبیٹر ٹائمر کیلئے اسکیمکس کی ضرورت ہے۔ میں ڈی سی موٹر کو دو سمت چلانے کے ل. کوشش کر رہا ہوں جب تک کہ یہ آخری مقام تک نہ پہنچے پھر روکیں اور قطبیت کو تبدیل کریں تاکہ جب بجلی کا دوبارہ استعمال ہوتا ہے تو یہ دوسری سمت چل جائے گی۔ پھر دوسرے سرے پر بھی یہی کام کریں۔
1. ٹائمر 1 منٹ کیلئے پاور آن کرتا ہے۔ (صبح 7 بجے صبح: 7: 01am)
30 موٹرسائیکل کا کہنا ہے کہ موٹر ایک سمت میں چلتا ہے جب تک کہ وہ اسٹاپ کی پوزیشن کو نہ لگائے۔
motor. موٹر سے بجلی بند ہوجاتی ہے جب وہ اسٹاپ کی پوزیشن سے ٹکرا جاتا ہے اور 1 منٹ کی تاخیر کرتا ہے۔ ٹائمر / اہم طاقت کو بند کرنے کے لئے. قطبیت کو بھی تبدیل کرتا ہے تاکہ
next. اگلی بار جب مرکزی ٹائمر آئے گا (10: 00-10: 01) یہ ایک ہی چیز کو الٹ سمت اور مسلسل دہراتا ہے
5. 12 وی ڈی سی موٹر ریورس (موٹر + اور - سے صرف دو کیبل)
6. Rev / Fwd موٹر کے لئے لیڈ اشارے کی ضرورت ہے
کیا آپ میری مدد کر سکتے ہیں سر؟
کسی بھی مدد کے لئے پیشگی شکریہ۔
یہ ایک اہم گھریلو پروجیکٹ ہے جس میں 100 reliable قابل اعتماد ہونا ضروری ہے۔
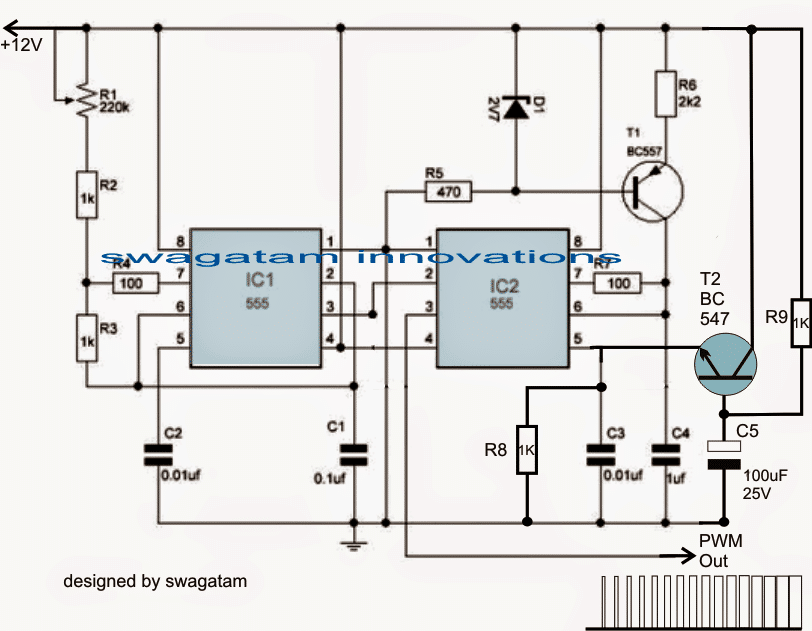
ڈیزائن

مندرجہ بالا اعداد و شمار میں ہم وقتا فوقتا متعین سیٹ کے بعد انکیوبیٹر موٹر کی مجوزہ ریورس فارورڈ موشن کو نافذ کرنے کے لئے کسی ڈیزائن کا تصور کرسکتے ہیں۔
فوری طور پر جب پاور آن ہوجاتی ہے تو ہمارے پاس مندرجہ ذیل منظر نامے ہوتے ہیں۔
'سیٹ' کے لئے مقناطیسی سوئچ کو غیر فعال حالت میں یا افسردہ حالت میں سمجھا جاسکتا ہے جب کہ موٹر یا ڈیزائن کردہ انکیوبیٹر میکانزم اپنی صفر کی پوزیشن میں ہے۔
براہ کرم نوٹ کریں کہ ترجیحی طور پر 'سیٹ' / 'ری سیٹ' سوئچ کو مقناطیسی ریڈ سوئچز کا استعمال کرتے ہوئے نافذ کیا جانا چاہئے۔
پاور آن ہونے کے ساتھ ہی ، آئی سی 4060 کو سی 2 کے ذریعے دوبارہ ترتیب دیا گیا ہے تاکہ وہ گنتی کے عمل کو صفر سے شروع کرے ، اور پن3 کو زیرو منطق پیش کیا گیا۔
اس ابتدائی صفر منطق کو C3 کے ذریعے T1 کے اڈے پر کھلایا جاتا ہے جو فوری طور پر T3 اور اس سے وابستہ ریلے کو چالو کرنے پر مجبور کرتا ہے۔ اس عمل میں R7 اس بات کو یقینی بناتا ہے کہ T1 / T3 اس انداز میں جڑ جائے۔
اس مقام پر ڈی پی ڈی ٹی ریلے اپنے N / O رابطوں پر عمل پیرا ہوتا ہے جس سے موٹر اور میکانزم کو آگے بڑھایا جاتا ہے۔
جیسے ہی موٹر حرکت کرنا شروع کرتی ہے ، 'سیٹ' بٹن کو اس طرح جاری کیا جاتا ہے کہ ٹی 4 اور اوپری ایس پی ڈی ٹی کو عمل کرنے کا موقع مل جاتا ہے ، جس میں ایس پی ڈی ٹی ریلے کو ایک اسٹینڈ بائی کے ساتھ ڈی پی ڈی ٹی کے N / C رابطے پیش کرتے ہوئے N / O پوزیشن میں تبدیلی آ جاتی ہے۔ سپلائی ..
موٹر اور / یا میکانزم حرکت جاری رکھتا ہے یہاں تک کہ اس کو 'ری سیٹ' کی حیثیت حاصل ہوجاتی ہے جس کی وجہ سے T2 T1 / T4 لیچ کو چالو اور ٹوٹ جاتا ہے۔
ٹی 4 سوئچڈ آف کے ساتھ ، ڈی پی ڈی ٹی ریلے اپنی پوزیشن کو N / O سے N / C میں تبدیل کرتا ہے اور موٹر میکانزم میں مخالف (الٹا) حرکت مہیا کرتا ہے۔
انکیوبیٹر موٹر میکانزم اب اپنی سمت سے پلٹ جاتا ہے اور ایک ریورس موشن شروع کرتا ہے جب تک کہ وہ 'سیٹ' پوائنٹ تک نہ پہنچ جائے جو T4 کی بیس ڈرائیو کو تیزی سے بند کردیتا ہے ، ایس پی ڈی ٹی نے ڈی پی ڈی ٹی کی کاٹنے کی طاقت کو بند کردیا ہے اور پورا میکانزم اب بھی کھڑا ہوجاتا ہے۔ .
اس دوران میں ، آئی سی 4060 گنتی جاری ہے یہاں تک کہ اس نے اپنے پن 3 (سی 3 کو خارج کر کے) ایک اعلی منطق سے گزرنے کے بعد دوبارہ صفر منطق پیدا کیا ہے۔
یہ سائیکل ایک بار پھر شروع ہوجاتا ہے اور جیسا کہ اوپر بیان ہوا ہے اس کا عمل دہرایا جاتا ہے۔
پچھلا: ارڈوینو کے ساتھ ایل ای ڈی پلک جھپکانا - مکمل ٹیوٹوریل اگلا: ہائی پاور انڈسٹریل مینز سرج دبانے والے کی کھوج کی