اس پوسٹ میں ہم اردوینو کا استعمال کرتے ہوئے ایک انکیوبیٹر تعمیر کرنے جارہے ہیں جو اس کے درجہ حرارت اور نمی کو خود سے منظم کرسکے گا۔ اس پروجیکٹ کی تجویز مسٹر عمران یوسف نے کی تھی جو اس ویب سائٹ کے خواہش مند پڑھنے والے ہیں۔
تعارف
یہ منصوبہ مسٹر عمران کی تجاویز کے مطابق تیار کیا گیا تھا ، لیکن اس پراجیکٹ کو سب کے لئے عالمی طور پر موزوں بنانے کے لئے کچھ اضافی ترمیم کی گئی ہے۔
اس پروجیکٹ کو انجام دینے کے ل You آپ اپنی تخلیقی صلاحیتوں اور تخیل کا استعمال کرسکتے ہیں۔
تو آئیے سمجھیں کہ انکیوبیٹر کیا ہے؟ (noobs کے لئے)
انکیوبیٹر ایک منسلک اپریٹس ہے جس کا اندرونی ماحولیاتی ماحول ماحول سے الگ تھلگ ہے۔
یہ نگہداشت کے تحت نمونے کے لئے سازگار ماحول پیدا کرنا ہے۔ مثال کے طور پر انکیوبیٹرز کو لیبارٹریوں میں مائکروبیل حیاتیات بڑھنے کے لئے استعمال کیا جاتا ہے ، انکیوبیٹرز قبل از وقت پیدا ہونے والے نوزائیدہ بچوں کی دیکھ بھال کے ل hospitals اسپتالوں میں استعمال ہوتے ہیں۔
اس پروجیکٹ میں جس طرح کی انکیوبیٹر ہم بنانے جا رہے ہیں وہ مرغی کے انڈوں یا کسی دوسرے پرندوں کے انڈوں سے بچاؤ کے لئے ہے۔
تمام انکیوبیٹرز میں ایک چیز مشترک ہے جو درجہ حرارت ، نمی کو منظم کرتی ہے اور آکسیجن کی مناسب فراہمی فراہم کرتی ہے۔
آپ فراہم کردہ بٹنوں کو دبانے سے درجہ حرارت اور نمی طے کرسکتے ہیں اور یہ حقیقی وقت میں اندرونی درجہ حرارت اور نمی کو بھی ظاہر کرتا ہے۔ ایک بار جب دونوں پیرامیٹرز سیٹ ہوجاتے ہیں تو وہ سیٹ پوائنٹ کو پورا کرنے کے ل automatically خود بخود ہیٹنگ عنصر (بلب) اور وانپائزر (ہیومیڈیفائر) کو کنٹرول کرتا ہے۔
آئیے اب انکیوبیٹر کے آلات اور ڈیزائن کو سمجھیں۔
انکیوبیٹر کا چیسس اسٹائرو فوم / تھرموکول باکس یا ایکریلک گلاس کا ہوسکتا ہے جو اچھی تھرمل موصلیت فراہم کرسکتا ہے۔ میں اسٹائرو فوم / تھرموکول باکس کی سفارش کروں گا جس کے ساتھ کام کرنے میں آسانی ہوگی۔
اپریٹس ڈیزائن:

25 واٹ کا بلب گرمی کے منبع سے زیادہ واٹج کے کام کرتا ہے جس سے ایک چھوٹے سے برتن میں انڈے کو تکلیف ہو سکتی ہے۔ نمی وانپورائزر کے ذریعہ فراہم کی گئی ہے ، آپ نیچے دیئے گئے کچھ جیسے ہی وانپائزر کو استعمال کرسکتے ہیں۔

اس سے بھاپ کی موٹی ندی پیدا ہوتی ہے جو انکیوبیٹر میں داخل ہوگی۔ بھاپ کو کسی بھی لچکدار ٹیوب کے ذریعہ لے جایا جاسکتا ہے۔
لچکدار ٹیوب کچھ ایسی ہی ہوسکتی ہے جیسے ذیل میں دکھایا گیا ہے:

اسٹیمروفوم / تھرموکول باکس کے اوپر سے بھاپ داخل ہوسکتی ہے جیسا کہ اپریٹس ڈیزائن میں دکھایا گیا ہے ، تاکہ نمی پر قابو پانے والے سوراخ اور انڈوں کو کم چوٹ پہنچنے سے زیادہ گرمی بچ جائے۔
اس کے ارد گرد کئی سوراخ والے انڈے لے جانے والا ایک سلنڈر ہے ، جسے سرو موٹر سے منسلک کیا گیا ہے۔ امدادی موٹر ہر 8 گھنٹوں میں سلنڈر 180 ڈگری کو گھوماتی ہے اس طرح انڈے گھومتی ہے۔
انڈوں کی گردش جنین کو شیل کی جھلی سے چپکنے سے روکتی ہے اور انڈے میں کھانے کی چیزوں سے بھی رابطہ فراہم کرتی ہے ، خاص طور پر انکیوبیشن کے ابتدائی مرحلے میں۔
گھومنے والے سلنڈر میں متعدد سوراخ ہونا ضروری ہے تاکہ مناسب ہوا کی گردش موجود ہوسکے اور سلنڈر بھی دونوں اطراف کھوکھلی ہو۔
گھومنے والا سلنڈر پیویسی ٹیوب یا گتے سلنڈر ہوسکتا ہے۔
کھوکھلی سلنڈر کے دونوں سرے پر آئس کریم کی چھڑی اس طرح چسپاں کریں کہ آئس کریم کی چھڑی دو برابر نیم دائرے بنائے۔ آئس کریم اسٹک کے وسط میں سرو موٹر کا بازو چسپاں کریں۔ دوسری طرف ایک سوراخ پرہار کریں اور دانت چن کو مضبوطی سے چسپاں کریں۔
دانتوں کی چن کو باکس کے اندر داخل کریں اور باکس کے اندر مخالف دیوار پر امدادی پیسٹ کریں۔ سلنڈر کو ہر ممکن حد تک افقی طور پر رہنا چاہئے ، اب جب یہ امدادی موٹر گھومتی ہے تو سلنڈر گھوم سکتا ہے۔
اور ہاں ، چیزوں کو بہتر بنانے کے لئے اپنی تخلیقی صلاحیتوں کا استعمال کریں۔
اگر آپ زیادہ انڈوں کو ایڈجسٹ کرنا چاہتے ہیں تو ایسے سلنڈر بنائیں اور متعدد سرو موٹر اسی کنٹرول لائن پن پر منسلک ہوسکتے ہیں۔
نمی پر قابو پانے والے سوراخ سب سے اوپر والے اسٹائروفوم / تھرموکول باکس کے ذریعے پنسل پوک کرکے بنائے جاسکتے ہیں۔ اگر آپ نے بہت سارے غیر ضروری سوراخ کیے ہیں یا اگر نمی یا درجہ حرارت بہت تیزی سے فرار ہو رہا ہے تو آپ بجلی یا ڈکٹ ٹیپ کا استعمال کرتے ہوئے کچھ سوراخوں کا احاطہ کرسکتے ہیں۔
ڈی ایچ ٹی 11 سینسر اس منصوبے کا مرکز ہے جو انکیوبیٹر (اندر) کے کسی بھی چار اطراف کے وسط میں رکھا جاسکتا ہے لیکن بلب یا نمی انلیٹ ٹیوب سے دور ہے۔
سی پی یو کے پرستاروں کو ہوا کی گردش کے ل the اپریٹس ڈیزائن میں دکھایا گیا ہے۔ ہوا کی گردش کے لئے کم سے کم دو استعمال کریں شائقین ہوا کو مخالف سمت میں آگے بڑھ رہے ہیں ، مثال کے طور پر: ایک CPU پرستار نیچے کی طرف دھکیل رہا ہے اور دوسرا CPU پرستار اوپر کی طرف دھکیل رہا ہے۔
زیادہ تر سی پی یو فین 12V پر کام کرتا ہے لیکن 9V میں ٹھیک کام کرتا ہے۔
یہ سب کچھ اپریٹس کے بارے میں ہے۔ اب سرکٹ پر بات کرتے ہیں۔
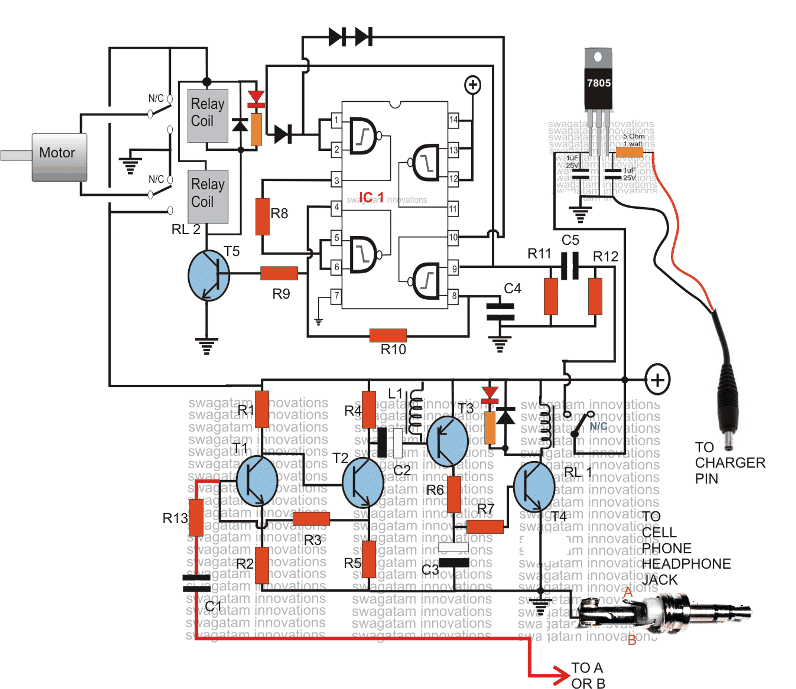
اسکیمیٹک ڈیاگرام:

مذکورہ بالا سرکٹ اردوینو سے LCD کنکشن کیلئے ہے۔ ایل سی ڈی کے برعکس کو ایڈجسٹ کرنے کے لئے 10K پوٹینومیٹر ایڈجسٹ کریں۔

اردوینو اس منصوبے کا دماغ ہے۔ درجہ حرارت اور نمی کی ترتیب کے ل for 3 پش بٹن موجود ہیں۔ پن A5 بلب کے لئے وانپریزر اور A4 کیلئے ریلے کو کنٹرول کرتا ہے۔ DHT11 سینسر پن A0 سے منسلک ہے۔ پنوں A1 ، A2 اور A3 دھکا بٹن کے لئے استعمال کیا جاتا ہے۔
پن # 7 (نان پی ڈبلیو ایم پن) सर्वो موٹر کے کنٹرول تار سے متصل ہے ، متعدد سرو موٹرز پن # 7 سے منسلک ہوسکتی ہیں۔ یہ غلط فہمی موجود ہے کہ سروو موٹرز صرف آرڈینوو کے پی ڈبلیو ایم پنوں کے ساتھ کام کرتی ہیں ، جو سچ نہیں ہے۔ یہ نان پی ڈبلیو ایم پنوں پر بھی خوشی سے کام کرتا ہے۔
ریورس کوائل کے پار ایک ڈایڈڈ 1N4007 کو متصل کریں جب کہ آن اور آف کرتے وقت ہائی ولٹیج اسپائکس کو ختم کرنے کے لverse ریورس کوائل میں ریورس کوائل کے پار جڑیں۔
بجلی کی فراہمی:

مذکورہ بالا بجلی کی فراہمی ریلے ، اردوینو ، سروو موٹر (ایس جی 90) اور سی پی یو شائقین کے لئے 9 V اور 5 V فراہمی فراہم کرسکتی ہے۔ ڈی سی جیک اردوینو کو طاقت دینے کے لئے مہیا کیا گیا ہے۔
وولٹیج ریگولیٹرز کے لئے گرمی کے ڈوب کا استعمال کریں۔
جو بجلی کی فراہمی کو ختم کرتا ہے۔
لائبریری DHT سینسر ڈاؤن لوڈ کریں:
https://arduino-info.wikispaces.com/file/detail/DHT-lib.zip
پروگرام کا کوڈ:
//------------------Program Developed by R.GIRISH-------------------//
#include
#include
#include
#define DHT11 A0
const int ok = A1
const int UP = A2
const int DOWN = A3
const int bulb = A4
const int vap = A5
const int rs = 12
const int en = 11
const int d4 = 5
const int d5 = 4
const int d6 = 3
const int d7 = 2
int ack = 0
int pos = 0
int sec = 0
int Min = 0
int hrs = 0
int T_threshold = 25
int H_threshold = 35
int SET = 0
int Direction = 0
boolean T_condition = true
boolean H_condition = true
LiquidCrystal lcd(rs, en, d4, d5, d6, d7)
Servo motor
dht DHT
void setup()
{
pinMode(ok, INPUT)
pinMode(UP, INPUT)
pinMode(DOWN, INPUT)
pinMode(bulb, OUTPUT)
pinMode(vap, OUTPUT)
digitalWrite(bulb, LOW)
digitalWrite(vap, LOW)
digitalWrite(ok, HIGH)
digitalWrite(UP, HIGH)
digitalWrite(DOWN, HIGH)
motor.attach(7)
motor.write(pos)
lcd.begin(16, 2)
Serial.begin(9600)
lcd.setCursor(5, 0)
lcd.print('Digital')
lcd.setCursor(4, 1)
lcd.print('Incubator')
delay(1500)
}
void loop()
{
if (SET == 0)
{
lcd.clear()
lcd.setCursor(0, 0)
lcd.print('Set Temperature:')
lcd.setCursor(0, 1)
lcd.print(T_threshold)
lcd.print(' *C')
while (T_condition)
{
if (digitalRead(UP) == LOW)
{
T_threshold = T_threshold + 1
lcd.setCursor(0, 1)
lcd.print(T_threshold)
lcd.print(' *C')
delay(200)
}
if (digitalRead(DOWN) == LOW)
{
T_threshold = T_threshold - 1
lcd.setCursor(0, 1)
lcd.print(T_threshold)
lcd.print(' *C')
delay(200)
}
if (digitalRead(ok) == LOW)
{
delay(200)
T_condition = false
}
}
lcd.clear()
lcd.setCursor(0, 0)
lcd.print('Set Humidity:')
lcd.setCursor(0, 1)
lcd.print(H_threshold)
lcd.print('%')
delay(100)
while (H_condition)
{
if (digitalRead(UP) == LOW)
{
H_threshold = H_threshold + 1
lcd.setCursor(0, 1)
lcd.print(H_threshold)
lcd.print('%')
delay(100)
}
if (digitalRead(DOWN) == LOW)
{
H_threshold = H_threshold - 1
lcd.setCursor(0, 1)
lcd.print(H_threshold)
lcd.print('%')
delay(200)
}
if (digitalRead(ok) == LOW)
{
delay(100)
H_condition = false
}
}
SET = 1
}
ack = 0
int chk = DHT.read11(DHT11)
switch (chk)
{
case DHTLIB_ERROR_CONNECT:
ack = 1
break
}
if (ack == 0)
{
lcd.clear()
lcd.setCursor(0, 0)
lcd.print('Temp:')
lcd.print(DHT.temperature)
lcd.setCursor(0, 1)
lcd.print('Humidity:')
lcd.print(DHT.humidity)
if (DHT.temperature >= T_threshold)
{
delay(3000)
if (DHT.temperature >= T_threshold)
{
digitalWrite(bulb, LOW)
}
}
if (DHT.humidity >= H_threshold)
{
delay(3000)
if (DHT.humidity >= H_threshold)
{
digitalWrite(vap, LOW)
}
}
if (DHT.temperature
delay(3000)
if (DHT.temperature
digitalWrite(bulb, HIGH)
}
}
if (DHT.humidity
delay(3000)
if (DHT.humidity
digitalWrite(vap, HIGH)
}
}
sec = sec + 1
if (sec == 60)
{
sec = 0
Min = Min + 1
}
if (Min == 60)
{
Min = 0
hrs = hrs + 1
}
if (hrs == 8 && Min == 0 && sec == 0)
{
for (pos = 0 pos <= 180 pos += 1)
{
motor.write(pos)
delay(25)
}
}
if (hrs == 16 && Min == 0 && sec == 0)
{
hrs = 0
for (pos = 180 pos >= 0 pos -= 1)
{
motor.write(pos)
delay(25)
}
}
}
if (ack == 1)
{
lcd.clear()
lcd.setCursor(0, 0)
lcd.print('No Sensor data.')
lcd.setCursor(0, 1)
lcd.print('System Halted.')
digitalWrite(bulb, LOW)
digitalWrite(vap, LOW)
}
delay(1000)
}
//------------------Program Developed by R.GIRISH-------------------//
سرکٹ کو چلانے کا طریقہ:
completed مکمل ہارڈ ویئر اور اپریٹس سیٹ اپ کے ساتھ ، سرکٹ کو پاور کریں۔
desire خواہش کا درجہ حرارت حاصل کرنے اور 'سیٹ بٹن' کو دبانے کیلئے ڈسپلے میں 'مرتب درجہ حرارت' کو دبائیں یا نیچے کا بٹن دبائیں۔
desire اب خواہش نمی حاصل کرنے اور 'سیٹ بٹن' کو دبانے کیلئے ڈسپلے میں 'نمی نمی طے کریں' کو نیچے یا نیچے کے بٹن دبائیں۔
· اس سے انکیوبیٹر کا کام شروع ہوتا ہے۔
انڈوں کے لئے درجہ حرارت اور نمی کی سطح کیلئے برائے مہربانی انٹرنیٹ سے رجوع کریں یا کسی پیشہ ور سے مشورہ کریں۔
اگر آپ کو اس ارڈینوو خود کار طریقے سے انکیوبیٹر درجہ حرارت اور نمی کنٹرول سرکٹ کے بارے میں کوئی خاص سوال ہے تو ، آزادانہ طور پر تبصرہ سیکشن میں اظہار خیال کریں۔ آپ کو فوری جواب مل سکتا ہے۔
پچھلا: خود کار طریقے سے خشک رن شٹ آف کے ساتھ ایس ایم ایس پر مبنی پمپ کنٹرولر اگلا: SMS پر مبنی واٹر سپلائی الرٹ سسٹم