اس پوسٹ میں ہم آئی سی L293 کی تکنیکی خصوصیات اور پن آؤٹ تفصیلات کی چھان بین کرتے ہیں جو ایک ورسٹائل کواڈ نصف ایچ ڈرائیور آئی سی ہے ، اور بہت سی دلچسپ موٹر کو نافذ کرنے کے لئے استعمال کیا جاسکتا ہے ڈرائیور بیسڈ سرکٹ ایپلی کیشنز ، جیسے آپریٹنگ موٹرز ، سولینائڈز اور دیگر آگمک بوجھ (4 یونٹ الگ الگ یا جوڑوں میں پش پل موڈ کے ذریعہ)۔
یہ کیسے کام کرتا ہے
آئی سی L293 بنیادی طور پر آؤٹ پٹس کے دو جوڑے شامل کرتا ہے جسے پش پل موڈ میں یا دو طرفہ انداز میں دو الگ الگ بوجھ کو چلانے کے لئے آزادانہ طور پر استعمال کیا جاسکتا ہے ، جسے ٹوٹیم پول موڈ بھی کہا جاتا ہے۔ متبادل طور پر یہ جوڑا جوڑا انفرادی طور پر ہوسکتا ہے غیر مستقیم انداز میں 4 انفرادی بوجھ کو چلانے کے لئے استعمال کیا جاتا ہے۔
بوجھ کی مذکورہ بالا کارروائیوں کو اسی ان پٹ پن آؤٹ کے ذریعے کنٹرول کیا جاتا ہے ، جو بیرونی آسکیلیٹر سرکٹ یا ایک سے شروع ہوتا ہے PWM ماخذ .
مثال کے طور پر اگر بوجھ کو ٹاٹیم قطب انداز میں چلانے کی ضرورت ہو تو ، آایسی کے دو ڈرائیور مراحل کے متعلقہ آدانوں کو خارجی سے متحرک کیا جاسکتا ہے۔ نیل دروازوں کے ایک جوڑے کے ذریعے جیسا کہ دوپٹہ ، جس میں ایک گیٹ آسکیلیٹر کے طور پر وائرڈ ہوسکتا ہے جبکہ دوسرا انورٹر کے طور پر۔
ان سے مخالف دو مرحلے کے سگنل نند دروازے اس کے بعد کل ٹوٹیم قطب (پش پل) انداز میں متعلقہ آؤٹ پٹس کو چلانے کے ل for L293 کے آدانوں کے ساتھ منسلک کیا جاسکتا ہے ، جس کے نتیجے میں اسی انداز میں جڑے ہوئے بوجھ کو چلایا جاسکتا ہے۔
پن آئوٹ L293 کی تفویض
آئیے LC3 کے مندرجہ ذیل خاکے کا حوالہ دیتے ہوئے اور مندرجہ ذیل وضاحت سے پن آؤٹ فنکشنز سیکھیں:

پن # 2 کنٹرول ان پٹ ہے ، جو آؤٹ پٹ پن # 3 کو کنٹرول کرتا ہے۔
اسی طرح ، پن # 7 آؤٹ پٹ پن # 6 کا کنٹرول ان پٹ ہے۔
پن # 1 پائن آؤٹس کے مذکورہ سیٹ کو چالو کرنے یا غیر فعال کرنے کے لئے استعمال ہوتا ہے۔ پن # 1 میں ایک مثبت پِن آؤٹ کے مندرجہ بالا سیٹ کو فعال اور فعال رکھتا ہے ، جبکہ منفی یا 0V سپلائی انہیں فوری طور پر غیر فعال کردی جاتی ہے۔
یکساں طور پر ، پن # 15 اور پن # 10 اسی پن # 14 اور پن # 11 آؤٹ پٹس کے لئے کنٹرول ان پٹ بن جاتے ہیں ، اور یہ اس وقت تک آپریشنل رہتے ہیں جب تک کہ پن # 9 مثبت منطق پر ہوتا ہے اور جب 0V منطق ہوتی ہے تو اسے غیر فعال کردیا جاتا ہے اس پن آؤٹ پر لاگو
جیسا کہ پہلے بیان ہوا ہے ، پن # 3 اور پن # 6 کو ان پٹ پن # 7 اور پن # 2 پر اینٹی فیز منطق سگنل کھلا کر کلثوم قطب جوڑے کے طور پر استعمال کیا جاسکتا ہے۔ مطلب ، جب پن # 2 کو ایک مثبت منطق سے کھلایا جارہا ہے تو ، پن # 7 کو منفی منطق اور اس کے برعکس ہونا چاہئے۔
اس سے آؤٹ پٹس پن # 6 اور پن # 3 کو ایک ہی سمت میں منسلک بوجھ کو چلانے کی سہولت ملے گی ، اور اس کے برعکس جب ان پٹ لاجک سگنلز کو الٹ کیا جائے گا تو ، لوڈ کا قطبیت بھی الٹ ہوجاتا ہے اور یہ مخالف سمت میں گھومنے لگتا ہے۔
اگر یہ تسلسل تیزی سے تبدیل ہوجاتا ہے تو پھر بوجھ اسی انداز میں یا پش پل انداز میں چلتا ہے۔
مذکورہ بالا کارروائی کو دوسری طرف کے ڈرائیوروں کے جوڑ میں بھی تیار کیا جاسکتا ہے۔
وی سی سی یا سپلائی مثبت آدانوں کو دو مختلف سپلائی آدانوں کے لئے آزادانہ طور پر تشکیل دیا گیا ہے۔
پن # 16 ، (وی سی سی 1) قابل پن آؤٹ کو چلانے اور آئی سی کے دیگر داخلی منطقی مراحل کو چلانے کے لئے استعمال کیا جاتا ہے ، اور اس کی فراہمی 5 وی کے ان پٹ کے ساتھ کی جاسکتی ہے ، حالانکہ زیادہ سے زیادہ حد 36V ہے
پن # 8 ، (وی سی سی 2) خاص طور پر موٹروں کو طاقت دینے کے لئے استعمال کیا جاتا ہے ، اور اس کو 4.5 وی سے لے کر 36 وی تک کسی بھی چیز سے کھلایا جاسکتا ہے۔
آئی سی L293 کی برقی تفصیلات
آایسی L293 4.5V اور 36V کے درمیان کسی بھی فراہمی کے ساتھ کام کرنے کے لئے ڈیزائن کیا گیا ہے ، جس میں زیادہ سے زیادہ 1 ایم پی سے زیادہ کی موجودہ ہینڈلنگ کی تصریح نہیں ہے (پلس موڈ میں 2 ایمپ ، 5 ایم ایس زیادہ سے زیادہ)
لہذا مذکورہ بالا تصریحات میں سے کسی بھی بوجھ کو آئی سی L293 کے زیر بحث آؤٹ پٹس میں چلایا جاسکتا ہے۔
ان پٹ کنٹرول منطق 7V سے زیادہ نہیں ہونا چاہئے ، چاہے وہ ایک مستقل فراہمی ہو یا PWM سپلائی۔
موٹر کنٹرول ایپلی کیشن کیلئے L293 IC کا استعمال
آئیے آئی سی L293 کو مختلف طریقوں سے استعمال کرتے ہوئے ، اور علیحدہ کنٹرول سہولت والے زیادہ سے زیادہ 4 موٹروں کا استعمال کرتے ہوئے موٹر کنٹرولر سرکٹس کو کیسے نافذ کریں۔
ہماری پچھلی پوسٹ میں ہم نے IC L293 کی پن آؤٹ اور کام کرنے کی تفصیلات کا مطالعہ کیا ، یہاں ہم یہ سیکھتے ہیں کہ کس طرح ایک ہی آئی سی کو مخصوص طریقوں اور تشکیلوں کے ذریعے موٹروں کو کنٹرول کرنے کے لئے استعمال کیا جاسکتا ہے۔
کنٹرول موڈ
آئی سی L293 کو موٹروں کو کنٹرول کرنے کیلئے درج ذیل طریقوں میں استعمال کیا جاسکتا ہے۔
1) آزاد PWM آدانوں کے ذریعہ 4 موٹریں۔
2) پی ڈبلیو ایم کے ذریعہ اسپیڈ کنٹرول کے ساتھ دو سمتاتی یا ٹوٹیم قطب وضع میں 2 موٹریں
3) پی ڈبلیو ایم ان پٹ کا استعمال کرتے ہوئے ایک 2 فیز بی ایل ڈی سی موٹر
ذیل کی شبیہہ میں بتایا گیا ہے کہ کس طرح آئی سی کو آزادانہ کنٹرول سے موٹروں کو کنٹرول کرنے کے لئے استعمال کیا جاسکتا ہے ، اور یہ بھی کہ ایک موٹر کو کسی حصول کے لئے کیسے استعمال کیا جاسکتا ہے۔ دو طرفہ کنٹرول :

آئی سی کے بائیں جانب ایک موٹر کو بائیڈریکشنل موڈ میں کام کرنے کے ل config ترتیب دیا گیا دکھاتا ہے۔ اس بات کا یقین کرنے کے لئے کہ موٹر کسی ایک منتخب سمت میں گھومتا ہے ، پن # 1 اور پن # 7 کو اینٹی فیز 5 وی ڈی سی ان پٹ کے ساتھ لاگو کیا جانا چاہئے۔ موٹر گردش کی سمت کو تبدیل کرنے کے ل 5 ، اس 5 وی قطبیت کو مذکورہ ان پٹ آؤٹ میں تبدیل کیا جاسکتا ہے۔
پن اور 1 کو موٹر اور آئی سی کو چلانے کے قابل بنانے کے لئے منطق کو بلند رکھنا چاہئے ، یہاں ایک منطق 0 موٹر کو فوری طور پر روک دے گی۔
کنٹرول ان پٹ پن آؤٹ پر فراہمی پی ڈبلیو ایم کی شکل میں ہوسکتی ہے ، اس کے لئے اضافی طور پر اس کا استعمال کیا جاسکتا ہے موٹر کی رفتار کو کنٹرول کرنا PWM ڈیوٹی سائیکل کو مختلف کرتے ہوئے 0 سے زیادہ سے زیادہ تک۔
آئی سی کے دائیں جانب ایک انتظام دکھایا گیا ہے جس میں متعلقہ پن # 15 اور پن # 10 پر آزاد پی ڈبلیو ایم آدانوں کے ذریعے موٹروں کے ایک جوڑے کو آزادانہ طور پر کنٹرول کیا جاتا ہے۔
پن اور 9 کو منطق سے اونچا ہونا ضروری ہے تاکہ موٹر اور آئی سی کو کام کرتے رہیں۔ اس پن آؤٹ پر ایک منطق صفر فوری طور پر منسلک موٹروں کے کام کو روکنے اور غیر فعال کردے گی۔
چونکہ آئی سی کے بائیں جانب اور دائیں طرف والے حصے ان کی کام کاج کی تفصیلات کے ساتھ یکساں ہیں ، موٹروں کے دکھائے جانے والے انتظام کو اسی طرح کے کام کو حاصل کرنے کے ل sw تبدیل کیا جاسکتا ہے جیسا کہ اوپر بیان کیا گیا ہے ، مطلب یہ ہے کہ دو انفرادی موٹریں اس سے منسلک ہوسکتی ہیں۔ آریھ میں آئی سی کے دائیں جانب بالکل اسی طرح لاگو کیا گیا ہے جیسے آایسی کے بائیں جانب۔
اسی طرح دو طرفہ نظام کو آئی سی پن آؤٹ کے دائیں جانب بالکل اسی طرح شامل کیا جاسکتا ہے جیسا کہ مذکورہ بالا آریھ میں آئی سی کے بائیں جانب حاصل کیا گیا ہے۔
مذکورہ بالا مثال سے پتہ چلتا ہے کہ کس طرح IC L293 کو 4 موٹروں کو انفرادی طور پر کنٹرول کرنے کے لئے استعمال کیا جاسکتا ہے ، یا دو موٹرز ایک دو طرفہ موڈ میں ، اور کس طرح پی سی ڈبلیو ایم فیڈ کا استعمال کرتے ہوئے رفتار کو بھی کنٹرول کیا جاسکتا ہے۔
2 فیز بی ایل ڈی سی موٹر کو کنٹرول کرنے کے لئے L293 کا استعمال

مذکورہ شبیہہ میں ہم دیکھ سکتے ہیں کہ کس طرح آئی سی L293 کو اشارہ شدہ پن آؤٹ کا استعمال کرتے ہوئے 2 مرحلے کے بی ایل ڈی سی موٹر کو کنٹرول کرنے کے ل config تشکیل دیا جاسکتا ہے اور کنٹرول اے اور کنٹرول بی کے بطور دکھائے جانے والے کچھ کنٹرول ان پٹ کے ذریعے۔
آئی سی کے آؤٹ پٹس میں ایک سنگل 2 فیز موٹر دیکھی جاسکتی ہے ، جبکہ ان پٹ کو نو گیٹ کے سیٹ سے لگایا جاتا ہے جو موٹر کنٹرول کے ل anti مطلوبہ اینٹی فیز ان پٹ لاجک کی تشکیل کے لئے ذمہ دار ہوجاتے ہیں۔
2-فیز موٹر کو صحیح طریقے سے گھومنے کے قابل بنانے کے ل Control کنٹرول اے اور کنٹرول بی پوائنٹس کو متبادل مآب کا نشانہ بنایا جاسکتا ہے۔
ردوبدل کی منطق کی قطعیت موٹر کی گھماؤ سمت کا فیصلہ کرتی ہے۔
موٹر پر لکیری اسپیڈ کنٹرول حاصل کرنے کے لئے ، کنٹرول A اور کنٹرول بی ان پٹس کو منطق کا ایک PWM فارم لاگو کیا جاسکتا ہے اور منسلک موٹر پر مطلوبہ اسپیڈ کنٹرول حاصل کرنے کے ل its اس کی ڈیوٹی سائیکل مختلف ہوسکتی ہے۔
اگر آپ کو تکنیکی وضاحتیں ، یا ڈیٹا شیٹ یا آئی سی کی پن آؤٹ تفصیلات کے بارے میں مزید شکوک و شبہات ہیں تو ، فوری جوابات کے ل below آپ ہمیشہ ذیل میں کوئی تبصرہ نہیں کرسکتے ہیں۔
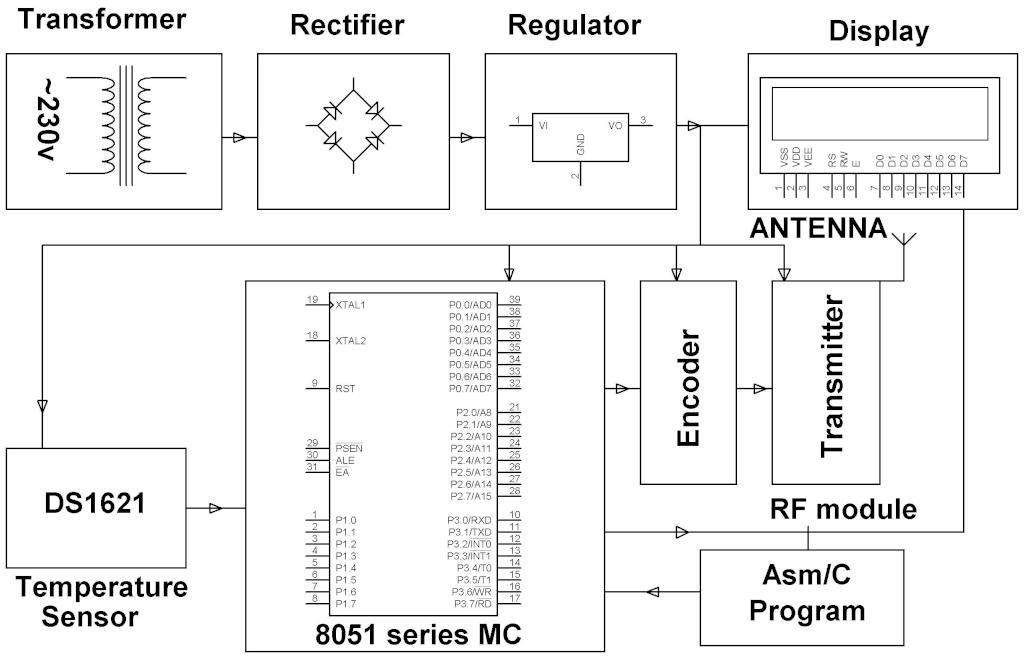
پچھلا: ایرڈوینو کا استعمال کرتے ہوئے 433 میگاہرٹز آریف لنک کا استعمال کرتے ہوئے وائرلیس تھرمامیٹر اگلا: بی ایل ڈی سی اور الٹرنیٹر موٹرز کیلئے یونیورسل ای ایس سی سرکٹ