اگرچہ مارکیٹ سے یا کسی آن لائن اسٹور سے کواڈکوپٹر ریموٹ کنٹرول سرکٹس بڑی آسانی سے حاصل کی جاسکتی ہیں ، لیکن ایک شوقین الیکٹرانک شوق کو کبھی یہ سیکھنے کی اجازت نہیں ہوتی ہے کہ یہ کام کس طرح ہوتا ہے اور یہ گھر میں ہی بنایا جاسکتا ہے یا نہیں۔
اس مضمون میں ہم ایک بنانے کی کوشش کریں گے سادہ کواڈکوپٹر ریموٹ کنٹرول سرکٹ مجرد اجزاء کا استعمال اور RF ریموٹ کنٹرول ماڈیولز کا استعمال ، اور بغیر پیچیدہ MCU پر مبنی سرکٹس کو شامل کیے۔
گائیڈ بائی مرحلہ دراصل دلچسپی رکھنے والے شوق سے یہ سمجھے گا کہ پی ڈبلیو ایم کے تصور کا استعمال کرتے ہوئے کواڈ کوپٹر کو کس طرح آسانی سے کنٹرول کیا جاسکتا ہے۔
ہم پہلے ہی سیکھ چکے ہیں کواڈکوپٹر کی بنیادی باتیں ، اب ہم ریموٹ کنٹرول سیکشن کی تحقیقات کریں جو آخر میں یونٹ کو دور سے اڑانے میں مدد فراہم کرے گا۔
بنیادی ماڈیولز کی ضرورت ہے
اس منصوبے کے لئے ضروری اہم اجزاء مندرجہ ذیل ہیں:
ہمیں بنیادی طور پر درج ذیل 3 سرکٹ مرحلے کی ضرورت ہوگی۔
1) 4 راستہ RF ریموٹ کنٹرول Tx ، Rx ماڈیولز - 1 سیٹ
2) آئی سی 555 پر مبنی پی ڈبلیو ایم جنریٹر سرکٹس - 4 این او ایس
3) بی ایل ڈی سی موٹر کنٹرولر سرکٹس - 4 این او ایس
چونکہ یہ گھریلو ورژن ہے ، لہذا ہم مجوزہ ڈیزائن کے ساتھ کچھ ناکارہیوں کی توقع کرسکتے ہیں ، جیسے کنٹرول کے لئے جوائس اسٹکس کی عدم موجودگی ، جو برتنوں یا پوٹینومیٹروں سے تبدیل کردی گئی ہے ، اس کے باوجود اس نظام کی عملی صلاحیت کی توقع کی جاسکتی ہے کہ پیشہ ور یونٹ
ہینڈ ہیلڈ PWM ٹرانسمیٹر یونٹ بنیادی طور پر TX ریموٹ ماڈیول پر مشتمل ہوگا جس میں 4 مجرد PWM کنٹرول سرکٹس شامل ہیں ، جبکہ کواڈکوپٹر کو 1 Rx سرکٹ کے ساتھ 4 مجرد BLDC ڈرائیور سرکٹس کے ساتھ منسلک کرنے کی ضرورت ہوگی۔
آئیے کواڈکوپٹر موٹر سرکٹس سے شروع کرتے ہیں ، اور دیکھیں کہ کس طرح بی ایل ڈی سی موٹر کنٹرولر کو Rx سرکٹ کے ساتھ تشکیل اور منسلک کرنے کی ضرورت ہے۔
کواڈ کوپٹر PWM وصول کرنے والا سرکٹ
پچھلی پوسٹوں میں سے ہم نے یہ سیکھا کہ سنگل چپ کا استعمال کرتے ہوئے ایک ورسٹائل بی ایل ڈی سی موٹر کنٹرولر کیسے بنایا جاسکتا ہے ، تاہم یہ ڈیزائن کواڈکوپٹر کے نسبتا he بھاری موٹروں کو چلانے کے لئے نہیں بنایا گیا ہے ، لہذا یہ موجودہ اطلاق کے لئے موزوں نہیں ہے۔
مذکورہ سرکٹ کے لئے ایک 'بڑے بھائی' کا اختیار خوش قسمتی سے دستیاب ہے اور کواڈکوپٹر موٹرز چلانے کے لئے بالکل موزوں ہوجاتا ہے۔ ہمیں اس طرح کے حیرت انگیز واحد چپ ایپلیکیشن مخصوص سرکٹ ماڈیولز مہیا کرنے کے لئے ٹیکساس انسٹرومینٹس کا شکریہ۔
اس اعلی موجودہ BLDC ڈرائیور IC کے بارے میں مزید معلومات کے ل you ، آپ مندرجہ ذیل پی ڈی ایف ڈیٹا شیٹ کا حوالہ دے سکتے ہیں۔
https://homemade-circits.com/wp-content/uploads/2015/10/slwu083a.pdf
نیچے دیئے گئے سیٹ میں DRV11873 IC کا استعمال کرتے ہوئے کواڈکوپٹر موٹر ڈرائیور کنٹرولر کا مکمل سرکٹ اسکیمیٹ دکھایا گیا ہے جو خود موجود کم بی ایل ڈی سی موٹر سرکٹ ہے جس میں مطلوبہ حفاظتی خصوصیات جیسے اوورلوڈ تحفظ ، تھرمل پروٹیکشن وغیرہ شامل ہیں یہ ماڈیول بنیادی طور پر ESC تشکیل دیتا ہے ہمارے موجودہ کواڈکوپٹر یونٹ کے لئے۔
اس ڈیزائن اور پی سی بی کی تفصیلات سے متعلق مزید معلومات کے ل you ، آپ ذیل میں اصل دستاویز کا حوالہ دے سکتے ہیں۔
http://www.ti.com/lit/ds/symlink/drv11873.pdf

یہ کیسے کام کرتا ہے
آایسی کے ایف ایس اور ایف جی پن آؤٹ بیرونی سرکٹس کے ذریعہ آئی سی کو مزید کنٹرول کے ساتھ بڑھانے کے ل are ہیں ، چونکہ ہم ان خصوصیات کو اپنے ڈیزائن میں استعمال نہیں کررہے ہیں ، لہذا ان پنوں کو غیر استعمال شدہ رکھا جاسکتا ہے اور اسے 100K ریزسٹر کے ذریعہ مثبت لائن پر ختم کیا جاسکتا ہے۔
آایسی کا آر ڈی پن آؤٹ موٹر کی گھماؤ سمت کا فیصلہ کرتا ہے۔ اس پن کو وی سی سی سے 100K ریزٹر کے ذریعہ جوڑنے سے موٹر پر اینٹلوک سوز گھومنے کی اجازت ملتی ہے جبکہ اسے غیر منسلک چھوڑنے کے برعکس ہوتا ہے اور موٹر کو گھڑی کی سمت میں گھومنے دیتا ہے۔
پن # 16 ہے پی ڈبلیو ایم ان پٹ بیرونی ذرائع سے پی ڈبلیو ایم ان پٹ انجیکشن کرنے کے لئے استعمال ہوتا ہے ، پی ڈبلیو ایم کے ڈیوٹی سائیکل میں مختلف ہوتی ہے جس سے موٹر کی رفتار اسی طرح بدل جاتی ہے۔
ایف آر ، سی ایس پن آؤٹ بھی ضرورت سے زیادہ غیر متعلق ہیں اور لہذا اسے آراگرام میں دکھائے جانے کے مطابق غیر استعمال شدہ چھوڑ دیا جاسکتا ہے ، اور اسے 100K ریزسٹر کے ذریعہ مثبت لائن پر ختم کیا جاسکتا ہے۔
یو ، وی ، ڈبلیو پن آؤٹ موٹر آؤٹ پٹس ہیں جن کو متعلقہ کواڈکوپٹر بی ایل ڈی سی 3 فیز موٹر سے مربوط کرنے کی ضرورت ہے۔
COM پن آؤٹ 3 فیز موٹر کی مشترکہ تار کو جوڑنے کے ل is ہے ، اگر آپ کی موٹر میں ایک عام تار نہیں ہے تو آپ آسانی سے 3 کلاس 2 ریس 2 ریسٹرز کو U ، W ، W پنوں سے جوڑ کر اس کی نقالی کرسکتے ہیں اور پھر ان کی عام میں شامل ہوسکتے ہیں۔ آئی سی کے COM پن کے ساتھ ختم ہوتا ہے۔
اسکیمیٹک PWM حیرت انگیز سرکٹ موڈ میں تشکیل شدہ ایک IC 555 بھی دکھاتا ہے۔ یہ سرکٹ ماڈیول کا ایک حصہ بن جاتا ہے اور اپنے پن # 7 سے پی ڈبلیو ایم آؤٹ پٹ کو مستحکم بیس اسپیڈ کے ذریعہ 4 موٹروں کو شروع کرنے اور موٹر کو مستقل گھومنے کے قابل بنانے کے لئے ، DRV آایسی سرکٹ کے PWM ان پٹ کے ساتھ منسلک دیکھا جاسکتا ہے۔ کسی مخصوص جگہ پر رفتار۔
اس سے باہر کواڈ کوپٹر ڈیزائن کے لئے اہم ELC سرکٹ یا BLDC ڈرائیور سرکٹ کا اختتام ہوتا ہے۔
ہمیں اپنے کواڈکوپٹر ڈیزائن میں چار موٹر کے ل such ایسے چار ماڈیول کی ضرورت ہوگی۔
مطلب ، آئی سی 555 پی ڈبلیو ایم اسٹیج کے ساتھ ساتھ اس طرح کے 4 ڈی آر وی آئی سی کواڈکوپٹر کے 4 موٹروں میں سے ہر ایک کے ساتھ وابستہ ہونا ضروری ہے۔
یہ ماڈیول یقینی بنائیں گے کہ عام طور پر تمام 4 موٹرز متعلقہ DRV کنٹرولر آئی سی میں سے ہر ایک پر ایک مقررہ اور یکساں پی ڈبلیو ایم سگنل لگا کر پہلے سے طے شدہ رفتار پر طے کی جاتی ہیں۔
اب آئیے سیکھیں کہ PWM کو ریموٹ کنٹرول کے ذریعہ کیسے تبدیل کیا جاسکتا ہے تاکہ ایک عام 4 چینل ریموٹ کنٹرول ہینڈسیٹ کا استعمال کرکے انفرادی موٹر کی رفتار کو تبدیل کیا جاسکے۔
آریف وصول کرنے والا ماڈیول (PWM کوٹواچک)

مذکورہ بالا سرکٹ ریسیور ریموٹ آر ایف سرکٹ کو دکھاتا ہے جسے سمجھا جاتا ہے کہ صارف کے ریموٹ ٹرانسمیٹر ہینڈسیٹ سے بیرونی وائرلیس پی ڈبلیو ایم ڈیٹا حاصل کرنے کے لئے کواڈکوپٹر کے اندر رہائش پذیر ہے اور پھر ساتھ والے ڈی آر وی کنٹرولر ماڈیولز کو کھانا کھلانے کے ل the سگنلز پر مناسب کارروائی کی جانی چاہئے۔ پچھلا حصہ
4 آؤٹ پٹ جن کا نام پی ڈبلیو ایم # 1 ہے… .پی ڈبلیو ایم # 4 کو پی آر ڈبلیو ایم پن # 15 کے ساتھ ڈی آر وی آای سی کے ساتھ منسلک کرنے کی ضرورت ہے جیسا کہ پچھلے خاکہ میں اشارہ کیا گیا ہے۔
جب بھی متعلقہ بٹن صارف کے ذریعہ اس کے ٹرانسمیٹر ہینڈسیٹ میں دبایا جاتا ہے تو RF وصول کنندہ یونٹ سے یہ PWM پن آؤٹ چالو ہوجاتا ہے۔
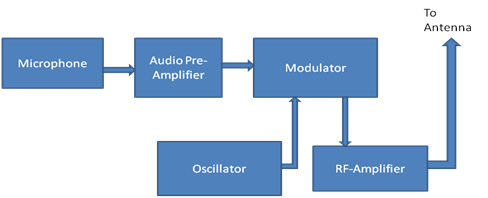
آریف ٹرانسمیٹر کو کس طرح وائرڈ کرنے کی ضرورت ہے (PWM انکوڈر)
مذکورہ بالا حصے میں ہم نے Rx یا ریموٹ رسیور سرکٹ اور اس کے 4 آؤٹ پٹ کواڈکوپٹر موٹر ESC ڈرائیور ماڈیولز سے کس طرح مربوط کرنے کی ضرورت پر تبادلہ خیال کیا۔
یہاں ہم دیکھتے ہیں کہ PWM ڈیٹا کو وائرلیس طور پر کواڈکوپٹر ریسیور یونٹ میں منتقل کرنے کے لئے PWM سرکٹس کے ساتھ سادہ RF ٹرانسمیٹر بنانے کی ضرورت ہے تاکہ انفرادی موٹر کی رفتار کو صرف ایک بٹن کے دبانے سے کنٹرول کیا جاسکے ، جو آخر کار اس کی وجہ بنتا ہے۔ سمت یا اس کی رفتار کو تبدیل کرنے کے لئے کواڈ کوپٹر ، صارفین کی ترجیحات کے مطابق۔

اوپر دکھایا گیا سرکٹ ٹرانسمیٹر ماڈیول کی وائرنگ کی تفصیلات کو ظاہر کرتا ہے۔ یہ خیال بہت آسان نظر آتا ہے ، مرکزی ٹرانسمیٹر سرکٹ TSW434 چپ نے تشکیل دیا ہے جو انکوڈڈ PWM سگنلز کو فضا میں منتقل کرتا ہے ، اور HT12E جو انکوڈڈ سگنلز کو TSW چپ پر کھانا کھلانے کے لئے ذمہ دار ہوتا ہے۔
پی ڈبلیو ایم سگنل 4 علیحدہ آای سی 555 سرکٹ مرحلے کے ذریعہ تیار کیے گئے ہیں جو شاید اسی طرح ہوسکتے ہیں جس پر پہلے ڈی آر وی کنٹرولر ماڈیول میں تبادلہ خیال کیا گیا تھا۔
4 آئی سی کے پی ڈبلیو ایم مندرجات کو انکوڈر آئی سی HT12E کے متعلقہ پن آؤٹ پر ختم کیا جاسکتا ہے جس میں ایس ڈبلیو 1 ---- ایس ڈبلیو 4 کے بطور اشارہ کیا گیا ہے۔
ان میں سے ہر ایک بٹن مطابقت پذیر ہوتا ہے اور رسیور ماڈیول کی ایک جیسی پن آؤٹ ٹوگل کرتا ہے جس پر ہم نے پہلے تبادلہ خیال کیا اور PWM # 1 ، PWM # 2… ..PWM # 4 کے بطور اشارہ کیا۔
مطلب SW1 دبانے سے وصول کنندہ یونٹ کے PWM # 1 آؤٹ پٹ فعال ہونے کا سبب بن سکتا ہے اور اس سے متعلقہ DRV ماڈیول کو ٹرانسمیٹر سے وصول شدہ ضابطہ اخذ شدہ پی ڈبلیو ایم سگنل کھانا کھلنا شروع ہوجائے گا اور اس کے نتیجے میں متعلقہ موٹر اس کی رفتار کو اس کے مطابق تبدیل کردے گی۔
اسی طرح ، SW2،3،4 دبانے کو استعمال کنندہ کی خواہش کے مطابق دیگر 3 کواڈکوپٹر موٹرز کی رفتار کو متاثر کرنے کے لئے استعمال کیا جاسکتا ہے۔
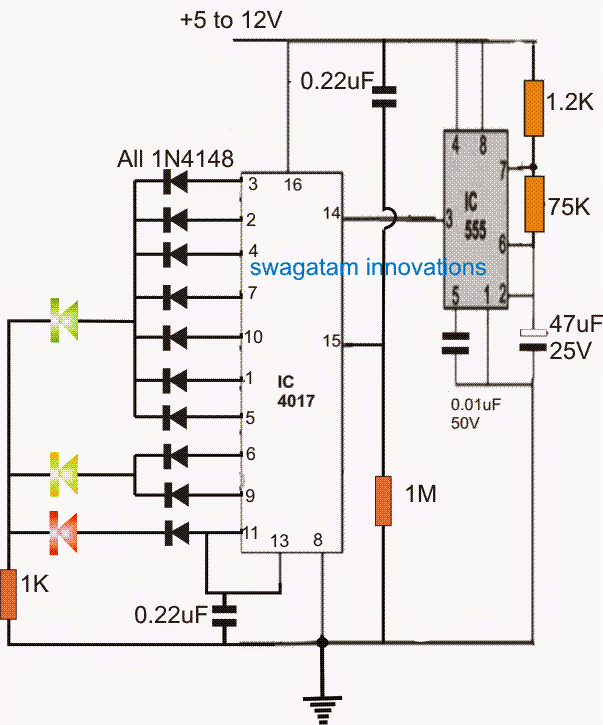
آئی سی 555 پی ڈبلیو ایم سرکٹ
مندرجہ بالا آریف ٹرانسمیٹر ہینڈسیٹ میں دکھائے جانے والے 4 پی ڈبلیو ایم سرکٹس مندرجہ ذیل آریگرام کا حوالہ دے کر بنایا جاسکتا ہے ، جو بالکل اسی طرح ہے جو ہمارے DRV کنٹرولر ESC سرکٹ میں دیکھا گیا تھا۔

براہ کرم یاد رکھیں کہ 5K برتن معمول کے برتن کی شکل میں ہوسکتا ہے اور اس برتن کو بٹنوں کے ساتھ اضافی طور پر اسی موٹرز پر مختلف رفتار منتخب کرنے کے لئے استعمال کیا جاسکتا ہے۔
مطلب کسی منتخب بٹن کو دبا کر رکھ کر اور اسی کے ساتھ ہی اسی 5KPWMpot کو حرکت میں لانے سے کواڈکوپٹر مطلوبہ سمت میں اس کی رفتار کو بڑھا یا گھٹا سکتا ہے۔
متبادل طور پر پی ڈبلیو ایم کو ابتدا میں کچھ اونچی یا نچلی سطح پر مقرر کیا جاسکتا تھا اور پھر اسی بٹن کو دبانے سے پی ڈبلیو ایم ترتیب کے مطابق اسی کواڈکوپٹر موٹر کو ترجیحی رفتار حاصل کرنے کے قابل بنائے گی۔
کواڈکوپٹر موٹر تفصیلات
مذکورہ بالا وضاحت شدہ کیاڈکاپٹر ریموٹ کنٹرول سرکٹ صرف ڈسپلے کے مقصد کے لئے استعمال ہونے کا ارادہ ہے ، اور اسے بوجھ اٹھانے یا کیمرہ استعمال کرنے کے لئے استعمال نہیں کیا جاسکتا ہے۔ اس سے یہ ظاہر ہوتا ہے کہ ڈیزائن میں استعمال ہونے والی موٹرز کو ترجیحا ایک کم موجودہ قسم کی ہونی چاہئے۔
DRV11873 آایسی کو 15V ، 1.5 AMP یا 20 واٹ موٹر کے لگ بھگ موٹریں چلانے کے لئے ڈیزائن کیا گیا ہے ... لہذا 15 سے 30 واٹ کی درجہ بندی والی کوئی بھی 3 مرحلہ BLDC موٹر اس مقصد کے لئے استعمال کی جاسکتی ہے۔
اس کواڈکوپٹر ڈیزائن کی بیٹری میں کوئی بھی 12v لائپو پی آر لی آئن بیٹری ہوسکتی ہے جو 1.5 ایم پی ایس مسلسل موجودہ میں 15V چوٹی کی فراہمی کے قابل ہے۔
تفصیلات کی تفصیلات
1306N برش لیس آؤٹ رونر مینی ایچر ڈی سی موٹر
پروپوزل کی گذارش: مائکرو موٹر
تعمیر: مستقل مقناطیس
سفر: برشلیس
سپیڈ (RPM): 2200rpm / v
لگاتار موجودہ (A): 1.5 ~ 2.6A
وولٹیج (V): 7.4 ~ 11.1V
چھوٹے ڈی سی موٹر: AX-1306N
وزن: 8g
شافٹ کا قطر: 1.5 ملی میٹر
بیٹری LI-PO: 2-3s
آپریٹنگ موجودہ: 1.5 ~ 2.6A
زیادہ سے زیادہ کارکردگی: 67

پچھلا: سینسر لیس BLDC موٹر ڈرائیور سرکٹ اگلا: پش بٹنوں کا استعمال کرتے ہوئے ہیٹر کنٹرولر سرکٹ