اس پوسٹ میں ہم ایلومینیم پائپوں اور بولٹوں کے استعمال سے کواڈ کوپٹر باڈی اسمبلی کی بنیادی باتوں پر تبادلہ خیال کریں گے ، مضمون کے بعد کے حصوں میں ہم ایک سادہ ڈرون سرکٹ کے بارے میں بھی تبادلہ خیال کریں گے جو پیچیدہ مائکروکنٹرولرز پر انحصار کیے بغیر چھوٹی ڈرون اسمبلی اڑانے کے لئے استعمال ہوسکتا ہے۔
ایک کواڈکاپٹر شاید سب سے آسان اڑن مشین ہے جس میں کم سے کم مقدار میں ائیرروڈینیٹک درستگی اور پیچیدگیوں کی ضرورت ہوتی ہے ، اور اس وجہ سے یہ کوئی تعجب کی بات نہیں ہے ، یہ مختلف شوقیوں کے مابین بہت زیادہ مقبولیت حاصل کر سکتی ہے جو کامیابی کے ساتھ اس کی تعمیر کرسکتی ہے .... ایسی مشین جس میں وہ واقعی اڑ سکیں اور اپنی مرضی سے کنٹرول کریں۔
کواڈ کوپٹر ڈائنامکس
حقیقت یہ ہے کہ تکنیکی اور حرکیات کے لحاظ سے کواڈکوپٹر ڈرون سب سے آسان ہے۔ دراصل 4 پروپیلرز اور متوازن فریم ڈھانچے کی شمولیت کی وجہ سے ہے ، جو مشکل موسمی حالات میں بھی ، مشین کو نسبتا good بہتر توازن کے ساتھ اڑنے کے قابل بناتا ہے۔
لیکن سادگی کا یہ مطلب بھی ہے کہ یہ نظام روایتی ہوائی جہاز اور ہیلی کاپٹر ماڈل کی طرح موثر نہیں ہوسکتا ہے جو رفتار اور ایندھن کی کھپت کے معاملے میں انتہائی کارکردگی کی نمائش کے لئے پیچیدہ طریقے سے ڈیزائن کیے گئے ہیں ، اور یقینا load بوجھ برداشت کرنے کی صلاحیت ... یہ سب لازمی طور پر ہوسکتے ہیں۔ ایک عام کواڈ کوپٹر سسٹم کی کمی ہے۔
بہر حال ، جہاں تک کسی شوق کے منصوبے کا تعلق ہے ، یہ مشین زیادہ تر شائقین کے لئے ایک بہترین انتخاب بن جاتی ہے ، جو گھر میں ، اپنی ہی ایک فلائنگ مشین بنانا انتہائی دل لگی اور دلچسپ سمجھتا ہے ، جو بالآخر 'سنتا ہے' اور جو بھی سمت چلتا ہے وہاں اڑ جاتا ہے۔ صارف اسے منتقل کرنے کو ترجیح دیتا ہے۔
تاہم ، کسی نئے کھلاڑی کے لئے ، جو تکنیکی طور پر اتنی آگاہ نہیں ہوسکتی ہے ، اسے سمجھنے کے لئے بھی اس سادہ مشین کو انتہائی پیچیدہ معلوم ہوسکتا ہے ، صرف اس وجہ سے کہ متعدد ویب سائٹوں میں پیش کی گئی زیادہ تر متعلقہ معلومات مفص lل اور 'زبان' میں اس بحث پر ناکام رہتی ہے۔ ایک عام آدمی کے مطابق ہوسکتا ہے۔
یہ مضمون ان خاص طور پر غیر تکنیکی لوگوں کے لئے لکھا گیا ہے جو ایک عمدہ فلائنگ مشین بنانے میں دلچسپی رکھتے ہیں لیکن اس مضمون کو ہضم کرنا بھی مشکل محسوس کرتے ہیں۔
آج کواڈ کوپٹرز کیوں تعمیر کرنے میں اتنا آسان ہیں
کیا آپ نے کبھی سوچا ہے کہ آج کی دنیا میں کواڈکوپٹر اور ڈرون تعمیر کرنا اتنا آسان کیوں ہے اور بجلی کا استعمال اس سے پہلے ناممکن تھا؟
یہ بنیادی طور پر لی آئن بیٹریوں کی ترقی اور بڑھانے کی وجہ سے ہے۔ یہ آج دستیاب بیٹریوں کی انتہائی موثر شکل ہیں جو وزن کے تناسب کو متاثر کن طاقت پیش کرتی ہیں۔ اس کے ساتھ ہی ، بی ایل ڈی سی موٹرز کی ایجاد اور انتہائی بہتر مستقل مقناطیس موٹروں نے بھی ڈرون کو آسانی سے تعمیر کرنے میں اہم کردار ادا کیا ہے۔
لی آئن بیٹری موٹرز پر گھماؤ ٹورک کی زبردست مقدار مہیا کرنے میں کامیاب ہے جو کواڈکوپٹر یونٹ کو سیکنڈوں میں زمین سے اوپر کی اونچائی پر دھکیلنے کے لئے کافی ہوجاتی ہے ، اور اس سے طویل عرصے تک ہوا سے چلنے کی اجازت بھی دیتی ہے۔ کارکردگی بہت موثر اور مفید ہے۔
کواڈکوپٹر کیسے اڑتا ہے
اب آئیے صحیح راستہ سے کودیں اور سمجھیں کہ کواڈکوپٹر کو کامیابی سے اڑانے کے لئے ضروری چیزیں کیا ہیں۔ مشین کو آسانی سے اڑانے کے لئے بنیادی باتیں یہ ہیں:


1) بنیادی طور پر مشین کو مضبوط اور مضبوط جسم کی ضرورت ہوتی ہے ، لیکن وزن میں انتہائی ہلکا ہوتا ہے۔ اس کو کھوکھلی مربع ایلومینیم اخراج پائپوں کا استعمال کرتے ہوئے من گھڑت یا جمع کیا جاسکتا ہے ، مناسب طریقے سے سوراخوں کی کھدائی کرکے اور فریم کو گری دار میوے اور بولٹ سے ٹھیک کرکے۔
2) ڈھانچہ ایک کامل '+' یا کامل 'x' کی شکل میں ہونا چاہئے ، جب تک کہ 'کراسنگ' پائپوں کے درمیان زاویہ ہر ایک 90 ڈگری پر ہو تب تک اس سے کوئی فرق نہیں پڑتا ہے۔

کواڈ کوپٹر کی تعمیر کے لئے درکار بنیادی عناصر کو مندرجہ ذیل تصویر میں دیکھا جاسکتا ہے:

پارٹ اسمبلی انکار
مذکورہ بالا عناصر کو اکٹھا کرنے کا طریقہ سے متعلق ذیل میں کسی حد تک متحرک نقلی نمائش:

کواڈ کوپٹر فریم ورک کی تشکیل کیسے کریں
'+' فریم کے ل The ایلومینیم مناسب طریقے سے کاٹ کر اور سائز سے تیار ایلومینیم اخراج کی نلیاں کاٹنے سے حاصل کیا جاسکتا ہے ، جیسا کہ ذیل میں دکھایا گیا ہے:

فریم کا حجم نسبتا and ہے اور اس لئے یہ اہم نہیں ہے ، آپ موٹروں کے ساتھ ایک وسیع فریم تیار کرسکتے ہیں جو ایک دوسرے کے ساتھ وسیع فٹ ہوسکتے ہیں یا ایک کمپیکٹ فریم ڈھانچہ تشکیل دے سکتے ہیں جہاں موٹریں زیادہ وسیع نہیں ہیں ... اگرچہ یہ یقینی بنانا ہوگا کہ پروپیلرز بہتر توازن اور توازن کو قابل بنانے کے لئے ایک دوسرے سے بہت دور ہیں۔
3) مرکزی سیکشن میں '+' فریم ڈھانچہ ایک مربع پلیٹ فارم کے ساتھ لگایا جانا چاہئے جہاں فریم بازو ایک دوسرے سے ملتے ہیں اور اسے عبور کرتے ہیں۔ یہ آسانی سے تمام ضروری الیکٹرانکس اور تاروں کو ایڈجسٹ کرنے کے لئے مناسب طور پر اچھی طرح سے تیار پالش ایلومینیم پلیٹ ہوسکتی ہے۔
اس طرح یہ مرکزی پلیٹ یا پلیٹ فارم بنیادی طور پر سسٹم کے الیکٹرانکس کی تنصیب اور رہائش کے لئے ضروری ہے جو بالآخر آپ کے کواڈکوپٹر کو کنٹرول کرنے کا ذمہ دار ہوگا۔
)) مندرجہ بالا فریم ورک مکمل ہونے کے بعد ، موٹرس کو کراس باروں کے اختتام کو طے کرنے کی ضرورت ہے ، جیسا کہ مذکورہ اعدادوشمار میں دکھایا گیا ہے۔
)) یہ کہنا بے جا ہے کہ تمام فٹنگ کا کام انتہائی درستگی اور کامل صف بندی کے ساتھ کرنے کی ضرورت ہے ، اس کام کے ل. کسی تجربہ کار تانے بانے کی انجمن کی ضرورت پڑسکتی ہے۔
چونکہ ڈیزائن میں ہر چیز جوڑیوں میں ہوتی ہے ، لہذا عناصر کو درست طریقے سے سیدھ میں رکھنا واقعی زیادہ مشکل نہیں ہوگا ، لہذا یہ زیادہ سے زیادہ مماثلت کے ساتھ جوڑے کو سائز اور فٹ کرنے کے بارے میں ہوتا ہے ، جس کے نتیجے میں یہ زیادہ سے زیادہ توازن ، توازن اور ہم آہنگی کو یقینی بنائے گا۔ نظام کے لئے.
ایک بار جب فریم ورک تیار ہوجائے تو ، یہ وقت آگیا ہے کہ وہ الیکٹرانک سرکٹس کو متعلقہ موٹروں کے ساتھ مربوط کرے۔ یہ کام سرکٹ دستی میں دی گئی ہدایات کے مطابق کرنے کی ضرورت ہوگی۔
سرکٹ بورڈز کو مناسب طور پر رہائش کے ساتھ یا پلیٹ کے اوپر سنٹرل پلیٹ کے نیچے والے حصے میں لگایا جاسکتا تھا ، پھر اسے مضبوطی سے بند کرنے کے ل an ایک مناسب کابینہ لگایا جاسکتا تھا۔

پروپیلرز کی گھماؤ ڈائرکشن کو سمجھنا
متوازن لفٹ آف کیلئے موٹر پروپیلرز کی گردش کی سمت کا تجزیہ:
مذکورہ متحرک نقالی کا حوالہ دیتے ہوئے ، موٹر پروپیلرز کی گردش کی سمت کو درج ذیل طریقے سے ترتیب دیا جانا چاہئے۔
اس کو بس اتنا ہونا ضروری ہے کہ ایک چھڑی کے سروں پر موٹرز ایک جیسی ہونی چاہئے لیکن دوسرے راڈ موٹر سمت سے مختلف ہونا چاہئے ، یعنی اگر اگر ایک چھڑی میں موٹریں گھڑی کی سمت میں گھوم رہی ہوں تو پھر دیگر تکمیل کے اختتام پر موجود موٹریں اینٹی کلاک وائس میں گھماؤ کرنے کے لئے چھڑی کو ضرور تیار کرنا چاہئے۔ سمت
براہ کرم موٹروں کی انسداد اداکاری کی تحریک کو صحیح طور پر سمجھنے کے لئے مذکورہ نقلی کا حوالہ دیں جو متوازن طور پر استعمال کو یقینی بنانے کے لئے موٹروں کو تفویض کرنے کی ضرورت ہوسکتی ہے۔
موٹروں کی رفتار کو کنٹرول کرتے ہوئے کواڈکوپٹر کی سمت کو کیسے کنٹرول کیا جائے۔
ہاں ، کواڈکوپٹر کی اڑان کی سمت آپ کی اپنی خواہش کے مطابق ٹویک اور کنٹرول کی جاسکتی ہے اور متعلقہ موٹروں پر محض مختلف رفتار (RPM) کا استعمال کرکے۔
مندرجہ ذیل تصاویر میں بتایا گیا ہے کہ مشین کو کسی مطلوبہ اڑان سمت کو حاصل کرنے اور اس پر عملدرآمد کرنے کے لئے متعلقہ موٹرز پر کس طرح بنیادی رفتار کی ترسیل کا اطلاق کیا جاسکتا ہے:




جیسا کہ مذکورہ آراگراموں میں اشارہ کیا گیا ہے ، موٹروں کے سیٹ کی رفتار کو مناسب طریقے سے کم کرکے ، یا موٹرز کے مخالف سیٹ کی رفتار میں اضافہ کرکے ، یا اپنی پسند کے مطابق رفتار کو موافقت کرتے ہوئے کواڈکوپٹر کو کسی بھی طرح ہوا میں سفر کرنے کے لئے بنایا جاسکتا ہے۔ مطلوبہ مخصوص سمت
مذکورہ بالا تصاویر بنیادی سمتوں کی نشاندہی کرتی ہیں ، جیسے فارورڈ ، ریورس ، دائیں ، بائیں وغیرہ ... تاہم ، کسی بھی دیگر عجیب سمت کو موثر طریقے سے متعلقہ موٹروں کی رفتار کو ایڈجسٹ کرکے موثر طریقے سے نافذ کیا جاسکتا ہے یا صرف ایک موٹر ہوسکتی ہے۔
مثال کے طور پر ، مشین کو N / W سمت کی طرف اڑانے پر مجبور کرنے کے لئے ، صرف S / E موٹر کی رفتار میں اضافہ کیا جاسکتا ہے ، اور N / E سمت پر مشین کو اڑانے کے قابل بنانے کے ل the ، S / کی رفتار ڈبلیو موٹر میں اضافہ کیا جاسکتا ہے ... وغیرہ۔ اس وقت تک اس پر عمل کرنے کی ضرورت ہے جب تک کہ کواڈکوپٹر کا مکمل کنٹرول صارف کے ذریعہ قابل حصول اور مہارت حاصل نہ ہوجائے۔
ایک عملی کواڈ کوپٹر ڈیزائن کرنا
اب تک ہم ڈرون باڈی اور ہارڈویئر کی بنیادی تعمیر کے بارے میں سیکھ چکے ہیں ، اب آئیے سیکھیں کہ کواڈکوپٹر یا ڈرون سرکٹ بنانے کا طریقہ بہت عام اجزاء کو جلدی اور سستے میں استعمال کیا جائے۔ میری ایک سابقہ پوسٹ میں ہم نے یہ سیکھا کہ مائیکروکنٹرولر کا استعمال کیے بغیر نسبتا complex پیچیدہ اور اس وجہ سے موثر کواڈکوپٹر فلائنگ مشین بنانے کا طریقہ سیکھیں ، مزید معلومات کے لئے آپ درج ذیل پوسٹوں کے ذریعے جانا چاہیں گے۔
ایم سی یو کے بغیر ریموٹ کنٹرول سرکٹ | الیکٹرانک سرکٹ
موجودہ مضمون میں ہم برشلیس موٹروں کو ختم کرکے اور برشڈ موٹروں کی جگہ لے کر مذکورہ بالا ڈیزائن کو زیادہ آسان بنانے کی کوشش کرتے ہیں ، اور اس کے نتیجے میں پیچیدہ سے نجات پانا ممکن بناتے ہیں۔ بی ایل ڈی سی ڈرائیور سرکٹ ماڈیول .
چونکہ کواڈکوپٹر کی میکانکی تعمیراتی تفصیلات کے بارے میں پہلے ہی جامع طور پر تبادلہ خیال کیا گیا ہے ، لہذا ہم صرف سرکٹ ڈیزائن سیکشن کے ساتھ معاملہ کریں گے اور یہ سیکھیں گے کہ یہ مجوزہ آسان ترین ڈرون سرکٹ کو اڑانے کے لئے کیسے بنایا جاسکتا ہے۔
جیسا کہ پہلے ذکر کیا گیا ہے کہ اس سادہ کواڈکوپٹر کو صرف بنیادی آریف ریموٹ کنٹرول ماڈیول کی ضرورت ہوتی ہے جیسا کہ ذیل کی تصویر میں دکھایا گیا ہے:

آپ کی ضرورت ہوگی یہ آریف ماڈیول خریدیں کسی بھی آن لائن اسٹور سے یا اپنے مقامی الیکٹرانک اسپیئر ڈیلر سے:
مذکورہ بالا کے علاوہ آریف دور دراز ماڈیولز 4 مستقل مقناطیس بریش موٹروں کی بھی ضرورت ہوگی جو دراصل ڈرون مشین کے دل کی تشکیل کرتی ہے۔ یہ مندرجہ ذیل تصویر میں دی گئی وضاحت کے ساتھ ، یا صارف کی مطلوبہ وضاحتوں کے مطابق کوئی دوسرا مماثل ہے۔

موٹر کی بجلی کی وضاحتیں:
- 6V = آپریٹنگ وولٹیج (چوٹی 12V)
- 200mA = موجودہ آپریٹنگ
- 10،000 = RPM
حصوں کی فہرست
- 1K ، 10K 1/4 واٹ = 1 ہر ایک
- 1uF / 25V کپیسیٹر = 1no
- پیش سیٹ کریں 10K یا 5K = 1no
- Rx = 5 واٹ تار واؤنڈ ریزسٹر ، قیمت کے استعمال کے ساتھ تصدیق کی جائے۔
- آئی سی 555 = 1no
- 1N4148 ڈایڈس = 2 نمبر
- IRF9540 موسفٹ = 1no
- 6V موٹر برشڈ ٹائپ = 4nos
- لچکدار تاروں ، ٹانکا لگانا، بہاؤ وغیرہ.
- مندرجہ بالا حصوں کو جمع کرنے کے لئے عام مقصد پی سی بی
- 4 چینل آریف ریموٹ کنٹرول ماڈیول ، جیسا کہ متعلقہ تصاویر میں دکھایا گیا ہے۔
- مضمون میں وضاحت کے مطابق ایلومینیم چینلز ، پیچ ، گری دار میوے ، پلیٹیں وغیرہ۔
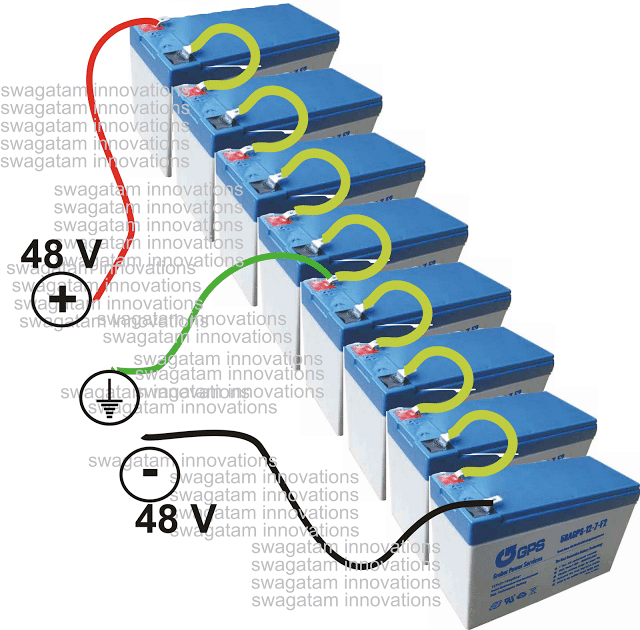
- جیسا کہ ذیل میں دکھایا گیا ہے بیٹری:

موٹروں کے ساتھ ریموٹ کنٹرول وصول کنندہ کو کیسے ترتیب دیں
ریموٹ کنٹرول وصول کنندہ کواڈکوپٹر موٹروں سے تشکیل کرنے کا طریقہ سمجھنے سے پہلے ، یہ سیکھنا ضروری ہوگا کہ موٹر اسپیڈ کو کس طرح مطلوبہ بائیں ، دائیں ، فارورڈ ، پسماندہ تحرک پیدا کرنے کے لusted ایڈجسٹ یا منسلک کیا جاتا ہے۔
بنیادی طور پر وہاں دو طریقے ہیں جن کواڈکوپٹر منتقل کرنے کے قابل بنایا جاسکتا ہے ، جو '+' اور 'x'modes میں ہیں۔ ہمارے ڈیزائن میں ہم اپنے ڈرون کے لئے بنیادی '+' حرکت پذیری کو استعمال کرتے ہیں ، جیسا کہ مندرجہ ذیل خاکے میں اشارہ کیا گیا ہے:

مذکورہ آریگرام کا حوالہ دیتے ہوئے ہمیں یہ احساس ہوتا ہے کہ ہمیں ڈرون پر مطلوبہ دشاتمک مشقوں کو انجام دینے کے لئے متعلقہ موٹرز کی رفتار کو مناسب طور پر بڑھانا ہوگا۔
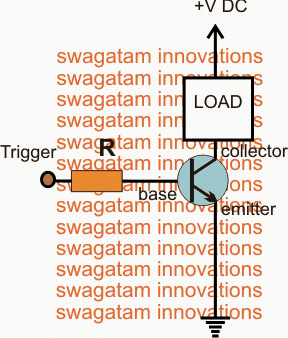
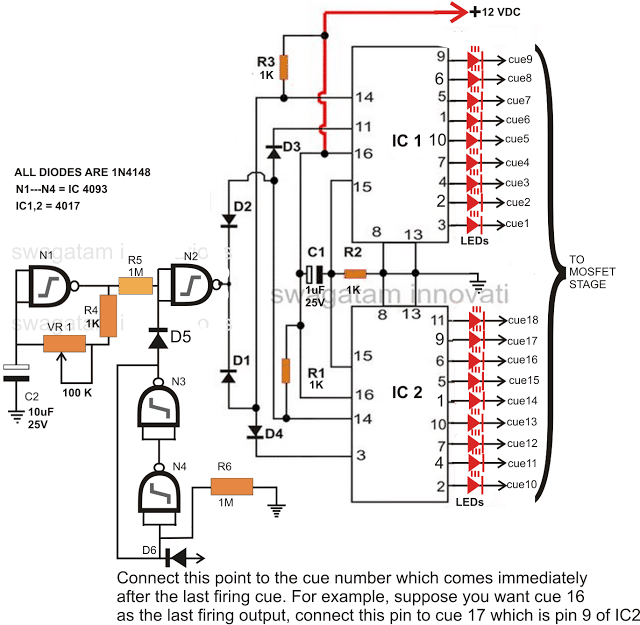
اسپیڈ میں اضافے کو ریموٹ کنٹرول ریلے کو درج ذیل وائرنگ آریگرام کے مطابق ترتیب دے کر نافذ کیا جاسکتا ہے۔ ذیل میں آریج میں ہم ایک کو دیکھ سکتے ہیں آئی سی 555 پی ڈبلیو ایم سرکٹ ریموٹ کنٹرول رسیور ماڈیول کے 4 ریلے کے ساتھ 6 ریلے (1 ریلے غیر استعمال شدہ ہے اور آسانی سے جگہ اور وزن کو دور کیا جاسکتا ہے) کے ساتھ وائرڈ۔
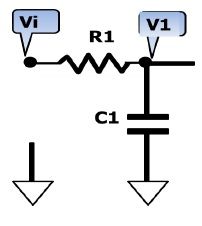
پی ڈبلیو ایم کو ایڈجسٹ کرنا
جیسا کہ آریھ میں دیکھا جاسکتا ہے ، پی ڈبلیو ایم فیڈ ریلے کے تمام N / C رابطوں سے جڑی ہوئی ہے ، جس سے یہ ظاہر ہوتا ہے کہ عام طور پر کواڈکوپٹر اس وردی اور مساوی پی ڈبلیو ایم فیڈ کے ذریعے منڈلاتا رہے گا ، جس کی ڈیوٹی سائیکل ابتدائی طور پر اس طرح ایڈجسٹ کی جاسکتی ہے کواڈکوپٹر زور اور اونچائی کی ایک درست مخصوص مقدار حاصل کرنے کے قابل ہے۔
یہ دکھایا گیا PWM برتن مناسب طریقے سے ایڈجسٹ کرکے تجربہ کیا جاسکتا ہے۔
ریلے رابطوں کو کس طرح تشکیل دیں
ریلے کے N / O رابطوں کو براہ راست مثبت فراہمی کے ساتھ وائرڈ دیکھا جاسکتا ہے ، لہذا جب بھی ریموٹ ٹرانسمیٹر ہینڈسیٹ پر متعلقہ بٹن دب جاتا ہے تو ، اسی ریلے کو وصول کنندہ ماڈیول میں چالو کیا جاتا ہے ، جس کے نتیجے میں وہ متعلقہ موٹر کو حاصل کرنے کے قابل بناتا ہے۔ بیٹری سے پوری 12V فراہمی۔
مذکورہ آپریشن چالو موٹر کو باقی موٹروں کی نسبت زیادہ تیز رفتار حاصل کرنے کی اجازت دیتا ہے جو کواڈکوپٹر کو مقررہ سمت کی طرف بڑھنے دیتا ہے۔
جیسے ہی ریموٹ بٹن جاری ہوتا ہے ، ڈرون فوری طور پر رک جاتا ہے اور مستقل موڈ میں منڈلاتا رہتا ہے۔
ویسے ہی ، دوسرے دشاتمک حرکات آسانی سے دوسرے تفویض کردہ بٹنوں کو ریموٹ ہینڈسیٹ پر دباکر حاصل کیا جاسکتا ہے۔
سرفہرست ریلے مشین کی محفوظ لینڈنگ کو یقینی بنانے کے لئے ہے ، یہ دکھائے جانے والے ریلے کے N / O رابطے کے سلسلے میں سیریز میں موجودہ ڈراپنگ ریزٹر کو شامل کرکے کیا جاتا ہے۔
اس ریزٹر قیمت کا استعمال کچھ تجربوں کے ساتھ کرنا ہوگا جیسے کواڈکوپٹر جب بھی اس ریزیٹر کو منسلک ریلے کے ذریعے ٹوگل جاتا ہے تو زمین سے کچھ فٹ کے ارد گرد گھومتا ہے۔
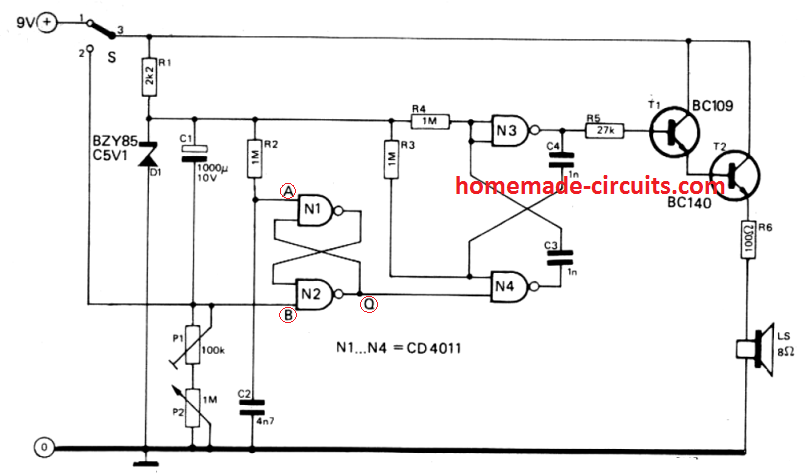
سرکٹ ڈایاگرام

دکھایا گیا ریلے آر ایف ماڈیول وصول کرنے والے کا حصہ ہے ، جس کے رابطے ابتدائی طور پر غیر منسلک ہیں (پہلے سے طے شدہ خالی) ہیں اور مندرجہ بالا آریھ میں اشارے کے مطابق تار لگانے کی ضرورت ہے۔
RF ریموٹ رسیور کواڈکوپٹر کے اندر نصب کیا جانا چاہئے اور مذکورہ بالا نمائش کے مطابق اس کے ریلے متعلقہ موٹرز اور بیٹری سے وائرڈ ہیں۔
آپ کچھ کنیکٹر (سبز رنگ) دیکھ سکتے ہیں جو ڈرون پر غیر ضروری طور پر وزن بڑھا سکتے ہیں۔ آپ وزن کو کم کرنے کے ل them ان سب کو ختم کرسکتے ہیں ، اور متعلقہ تاروں کو سولڈرنگ کے ذریعے براہ راست پی سی بی سے جوڑ سکتے ہیں۔
ڈرون کیسے حرکت کرتا ہے:
جیسا کہ مذکورہ بالا گفتگو میں بیان کیا گیا ہے ، جب کسی خاص ریموٹ بٹن کو دبایا جاتا ہے تو ، یہ کواڈکوپٹر ماڈیول کی اسی ریلے کو آگے بڑھاتا ہے جس کی وجہ سے متعلقہ موٹر تیزی سے آگے بڑھتی ہے۔
اس آپریشن کے نتیجے میں مشین کو موٹر کے مخالف سمت میں بڑھنے پر مجبور کردیا گیا ہے جو تیز رفتار آر پی ایم پر گھومنے کے لئے تبدیل کیا جارہا ہے۔
اس طرح مثال کے طور پر ، ساؤتھ موٹر کی رفتار بڑھنے سے مشین شمال کی طرف بڑھنے کا سبب بنتی ہے ، شمالی موٹر میں اضافے کی وجہ سے یہ جنوب کی طرف بڑھتا ہے ، اسی طرح مشرقی موٹر کی رفتار بڑھنے سے یہ مغرب اور اس کے برعکس منتقل ہوتا ہے۔
دلچسپ بات یہ ہے کہ ، جنوب / مشرقی موٹروں کو بڑھانا کواڈکوپٹر کو اس کے مخالف شمال / مغرب کی طرف جانا پڑتا ہے جو اخترن موڈ میں ہے .... اور اسی طرح کی۔
مذکورہ بالا کے پیشہ اور افراد نے سادہ قدوکوپٹر ریموٹ کنٹرول سرکٹ کی وضاحت کی۔
پیشہ
- نسبتا new نئے شوق کے ذریعہ بھی سستا اور تعمیر کرنا آسان ہے۔
- پیچیدہ جوائس اسٹک آپریشنوں کی ضرورت نہیں ہے۔
- سنگل 6 چینل ریموٹ کنٹرول ماڈیول کا استعمال کرتے ہوئے کنٹرول کیا جاسکتا ہے
Cons کے
- صاف موٹرز کی شمولیت کی وجہ سے بیٹری بیک اپ کے معاملے میں کم کارگر
- دشاتمک رفتار مستقل ہے اور ریموٹ کنٹرول ہینڈسیٹ کے ذریعہ مختلف نہیں ہوسکتی ہے
- بٹن سوئچ کرتے وقت پینتریبازی ہموار نہیں بلکہ تھوڑا سا جھٹکا ہوسکتی ہے۔
پچھلا: فورس سینسنگ ریزٹر کی وضاحت اگلا: کیپسیٹو وولٹیج ڈیوائڈر