اس دور میں صنعتی آٹومیشن ، روبوٹ کو پیداوار کے عین اور بہتر معیار کے ل various مختلف عملوں سے نمٹنے کے لئے استعمال کیا جاتا ہے۔ کامل روبوٹ کے لئے مثالی موٹر کا انتخاب ہمیشہ مشکل کام ہوتا ہے جبکہ خاص طور پر صنعتوں کے لئے روبوٹ کو ڈیزائن کرتے ہوئے۔ کا مناسب انتخاب بجلی کی موٹریں صنعتی روبوٹ میں بازو پر قابو پانے ، پوزیشن ، کونیی اور خطوطی حرکتوں کا حساب لینے کیلئے کئی پیرامیٹرز کی ضرورت ہوتی ہے۔

صنعتی روبوٹکس میں استعمال ہونے والی موٹریں
روبوٹکس کے شوقین کے لئے موٹر سلیکشن کم سے کم سمجھا ہوا تصور ہے جس میں حکمت عملی تیار کرنے اور سنجیدہ تجزیے کی ضرورت ہوتی ہے۔ اس میں روبوٹ کی رفتار ، ایکسلریشن ، ٹارک کی ضروریات کو روبوٹ کے وزن ، پہیے کے سائز اور اطلاق پر منحصر کرنا ہوتا ہے جہاں اسے لاگو کیا جانا چاہئے۔ متعدد قسم کی موٹریں ہیں۔ آج کی مارکیٹ میں دستیاب ہیں ، لیکن زیادہ تر چھوٹے پیجر موٹرز ، امدادی موٹریں ، لکیری موٹریں ، کھڑی موٹریں اور DC گیئر موٹرز ان کے اطلاق کے علاقے کے مطابق صنعتی روبوٹ میں استعمال ہوتی ہیں۔
معذور روبوٹ کے ساتھ موٹر کا ناجائز انتخاب ختم ہوجاتا ہے تو صنعتی روبوٹس کو حقیقی ، درست اور تمام حقیقت پسندانہ وضاحتوں کو مدنظر رکھتے ہوئے تمام صنعتی عمل کی ضروریات کو پورا کرنے کے لئے مناسب بنانے کے لئے کس قسم کی موٹر بہترین اور مناسب ہے؟
یہاں ہم نے صنعتی پیشہ ور افراد کے لئے ان موٹر کی کچھ بصیرتیں جمع کیں جو صنعتی ایپلی کیشنز کے لئے منتخب ہونے کے لئے اسی موٹر کا انتخاب کریں۔
ہم آپ کو ماہرین کی رائے پر عمل کرنے کی ترغیب دیتے ہیں جس کا مقصد روبوٹ کی عین مطابق ، لاگت سے موثر اور قابل اعتماد نقل و حرکت کے لئے دستیاب ڈی سی ، اسٹیپر ، برش لیس اور امدادی موٹرز کے ساتھ صنعتی روبوٹکس کے لئے بہترین موٹرز فراہم کرنا ہے۔
چہ سمپاتھ کمار
VLSI ڈیزائن میں M.tech
تکنیکی مشمول مصنف
 ڈی سی موٹرز مسلسل آپریشن کے ل for وسیع حدود میں دستیاب ہیں ، لیکن اس سے متعلقہ اطلاق کے مطابق سواروں میں گیئر میں کمی کی ضرورت ہے۔ اسٹیپر موٹر کو گیئر میں کمی کی ضرورت نہیں ہے کیونکہ اس کا تیز عمل مخصوص ایپلی کیشنز کے لئے کم رفتار مہیا کرتا ہے۔ آخر میں موٹر موٹروں کو عین اور درست کنٹرول کے لئے استعمال کیا جاتا ہے جو بند لوپ آپریشنوں میں لاگو ہوتا ہے۔ لیکن اس کے لئے اضافی آراء اور ڈرائیونگ سرکٹری کی ضرورت ہے لہذا یہ ڈی سی اور اسٹپر موٹر سے مہنگا ہے۔ لہذا امدادی موٹریں اس کی عین مطابق حرکت کی وجہ سے روبوٹ کو زیادہ قابل اعتماد بناتی ہیں۔
ڈی سی موٹرز مسلسل آپریشن کے ل for وسیع حدود میں دستیاب ہیں ، لیکن اس سے متعلقہ اطلاق کے مطابق سواروں میں گیئر میں کمی کی ضرورت ہے۔ اسٹیپر موٹر کو گیئر میں کمی کی ضرورت نہیں ہے کیونکہ اس کا تیز عمل مخصوص ایپلی کیشنز کے لئے کم رفتار مہیا کرتا ہے۔ آخر میں موٹر موٹروں کو عین اور درست کنٹرول کے لئے استعمال کیا جاتا ہے جو بند لوپ آپریشنوں میں لاگو ہوتا ہے۔ لیکن اس کے لئے اضافی آراء اور ڈرائیونگ سرکٹری کی ضرورت ہے لہذا یہ ڈی سی اور اسٹپر موٹر سے مہنگا ہے۔ لہذا امدادی موٹریں اس کی عین مطابق حرکت کی وجہ سے روبوٹ کو زیادہ قابل اعتماد بناتی ہیں۔
وشونااتھ پرتھپ
الیکٹریکل پاور انجینئرنگ میں ایم ٹیک
تکنیکی مشمول مصنف

کسی مقام یا جگہ سے کسی چیز کو چننے اور اسے کسی دوسری پوزیشن یا جگہ پر رکھنے کے ل industries عام طور پر روبوٹس انڈکس میں پائے جاتے ہیں۔ اس مقصد کے لئے ، روبوٹ کے جوڑوں کی کونیی حرکت کو قابو کرنے کی ضرورت ہے ، جو سرو موٹروں کا استعمال کرتے ہوئے حاصل کیا جاسکتا ہے۔ یہ سرو موٹرز روبوٹک کنٹرولر کے ذریعہ دیئے گئے PWM ڈیٹا کا استعمال کرتے ہوئے کنٹرول کرتے ہیں جو روبوٹ کے جوڑ کو تیز کرنے کے ل. دیتے ہیں۔ امدادی موٹریں کسی چیز کو رکنے کی پوزیشن سے جلدی منتقل کرنے کے لئے کافی ٹارک تیار کرنے کی صلاحیت رکھتی ہیں۔ اس طرح ، یہ فوجی اور صنعتی روبوٹک گاڑیوں میں پہیے کے طور پر استعمال ہوتے ہیں۔ اسٹیپر موٹرز کو پوزیشن پر قابو پانے کے ل used بھی استعمال کیا جاسکتا ہے لیکن یہ باقی مدت میں صرف کمانڈ لگانے اور کمانڈ پوزیشن پر فائز ہونے کے لئے بھی بجلی کا استعمال کریں گے۔ لہذا ، امدادی موٹرز عموماotics صنعتی روبوٹکس میں اسٹپر موٹرز کے اعلی کارکردگی کے متبادل کے طور پر استعمال ہوتی ہیں۔
ایس نریش ریڈی
ایمبیڈڈ سسٹم میں M.tech
پروجیکٹ گائیڈ
مکینیکل روبوٹ کی ساخت پرفیو کو کنٹرول کرنا چاہئے  rm کام روبوٹ کو کنٹرول کرنے کے لئے تین مختلف مراحل ہیں جیسے تاثر ، پروسیسنگ اور عمل۔ سینسر روبوٹ کو اس کے جوڑ کی پوزیشن اور اس کے آخری اثر کے بارے میں معلومات دیتے ہیں ، پھر اس معلومات پر عملدرآمد کنٹرول یونٹ پر ہوتا ہے اور موٹر کو مناسب سگنل کا حساب لگاتا ہے جو مکینیکل طور پر حرکت پذیر ہوتا ہے۔ روبوٹ کی بڑی تعداد میں الیکٹرک موٹرز استعمال ہوتی ہیں۔ بار بار برشلیس اور برش شدہ ڈی سی موٹرز پورٹیبل روبوٹ میں استعمال ہوتی ہیں اور صنعتی روبوٹ میں اے سی موٹرز استعمال ہوتی ہیں۔ ہلکی بوجھ والے نظاموں میں یہ موٹرز کو ترجیح دی جاتی ہے ، اور جہاں حرکت کی نمایاں شکل گھماؤ ہوتی ہے۔
rm کام روبوٹ کو کنٹرول کرنے کے لئے تین مختلف مراحل ہیں جیسے تاثر ، پروسیسنگ اور عمل۔ سینسر روبوٹ کو اس کے جوڑ کی پوزیشن اور اس کے آخری اثر کے بارے میں معلومات دیتے ہیں ، پھر اس معلومات پر عملدرآمد کنٹرول یونٹ پر ہوتا ہے اور موٹر کو مناسب سگنل کا حساب لگاتا ہے جو مکینیکل طور پر حرکت پذیر ہوتا ہے۔ روبوٹ کی بڑی تعداد میں الیکٹرک موٹرز استعمال ہوتی ہیں۔ بار بار برشلیس اور برش شدہ ڈی سی موٹرز پورٹیبل روبوٹ میں استعمال ہوتی ہیں اور صنعتی روبوٹ میں اے سی موٹرز استعمال ہوتی ہیں۔ ہلکی بوجھ والے نظاموں میں یہ موٹرز کو ترجیح دی جاتی ہے ، اور جہاں حرکت کی نمایاں شکل گھماؤ ہوتی ہے۔
سریش میگاجی
ایم وائرلیس مواصلاتی سسٹم میں ٹیک
تکنیکی مشمول مصنف

اگر آپ ’’ روبوٹکس ‘‘ اور ان کی ’انڈسٹری‘ کے اطلاق میں شامل ہونا چاہتے ہیں تو ، کسی کو ان ’موٹرز‘ کے بارے میں معلوم ہونا چاہئے جو روبوٹکس میں استعمال ہوتے ہیں کیونکہ روبوٹکس زیادہ تر موٹروں پر منحصر ہوتا ہے۔ عام طور پر ’روبوٹکس مشینیں‘ پروڈکشن میں مختلف ایپلی کیشنز کے لئے استعمال ہوتی ہیں۔ مختلف ’موٹرز‘ جیسے ڈی سی ، پلسیڈ ، اسٹیپر ، آپٹیکل ڈرائیو ، جزوی موڑ ، اور ہال اثر موٹرز وغیرہ… کچھ تکنیکوں کے ساتھ استعمال ہوتے ہیں تاکہ ان کو انڈسٹری میں لاگو کیا جا friendly اور ان کو دوستانہ بنایا جاسکے ، جیسے۔
- D.C موٹرز بیٹری پر مبنی ایپلی کیشنز ، سست رفتار ، متحرک ایپلی کیشنز کے لئے استعمال کی جاتی ہیں۔
- جہاں کہیں بھی ہمیں گردش پر مبنی ایپلیکیشن کی ضرورت ہو ، ہم سٹیپپر موٹرز جیسے یک پولر اور دو قطبی موٹریں استعمال کرسکتے ہیں۔
- سر اور بازو کی نقل و حرکت کے ل we ، ہم جزوی موڑ والی موٹریں استعمال کرسکتے ہیں۔
- اگر ہم مقناطیسی میدان استعمال کرنا چاہتے ہیں تو ، ہم ہال اثر اور آپٹیکل ڈرائیو موٹرز وغیرہ استعمال کرسکتے ہیں۔
روبوٹکس کا استعمال کرکے جو سمارٹ موٹرز کا استعمال کرتے ہیں ، ہم پیسہ ، وقت ، جگہ ، مؤثر حرکت وغیرہ بچا سکتے ہیں۔
اجے سہارے
مارکیٹنگ ایگزیکٹو

صنعتی روبوٹ ایک صنعتی مینوفیکچرنگ ماحول میں استعمال ہوتے ہیں۔ یہ ایسے ہتھیار ہیں جن کو خاص طور پر اس طرح کے ایپلی کیشنز کے لئے تیار کیا گیا ہے جیسے ویلڈنگ ، مادی ہینڈلنگ ، پینٹنگ اور دیگر۔
صنعتی ماحول میں استعمال ہونے والے ہر میکٹرونک آلے کو روبوٹ نہیں سمجھا جاسکتا۔ جیسا کہ آئی ایس او (بین الاقوامی معیار کی تنظیم) کی طرف سے وضاحت کی گئی ہے ایک خود بخود کنٹرول ، reprogrammable ، بہاددیشیی ہیرا پھیری سے تین یا زیادہ محوروں میں قابل پروگرام صنعتی روبوٹ سمجھا جاتا ہے۔
صنعتی روبوٹکس میں استعمال ہونے والی موٹریں ہیں
- باری باری موجودہ (AC) موٹرز
- براہ راست موجودہ (DC) موٹرز
- امدادی موٹریں
- اسٹپر موٹرز۔
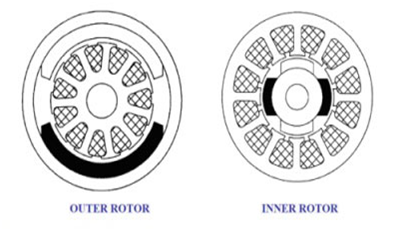
1. AC موٹرز کو مزید غیر متشدد اور ہم آہنگی والی اقسام میں تقسیم کیا جاسکتا ہے۔ مثال کے طور پر ، انڈکشن AC موٹر ایک غیر متشدد قسم کا یونٹ ہے جو بنیادی طور پر ایک تار کے زخم والے اسٹیٹر اور ایک روٹر پر مشتمل ہوتا ہے۔ بجلی تار سے منسلک ہے اور اس سے بہتا ہوا اے سی کرنٹ کوائلڈ تار میں ایک برقی مقناطیسی (EM) فیلڈ کی حوصلہ افزائی کرتا ہے ، جس میں ایک مضبوط کافی فیلڈ روٹر حرکت کے لئے قوت فراہم کرتا ہے۔ ہم وقت ساز موٹریں مستقل رفتار موٹر ہیں جو AC لائن فریکوئنسی کے ساتھ ہم آہنگی میں چلتی ہیں اور عام طور پر استعمال ہوتی ہیں جہاں عین مطابق مستقل رفتار کی ضرورت ہوتی ہے۔
2. روبوٹکس سمیت بہت سے صنعتی ایپلی کیشنز ، تیز رفتار اور سمت کنٹرول کرنے میں آسانی کی وجہ سے اکثر ڈی سی موٹروں کا استعمال کرتے ہیں۔ وہ مکمل لفٹ سے لے کر صفر تک ، لاتعداد بوجھ کے ساتھ ، لامحدود رفتار کی حد کے قابل ہیں۔
کیونکہ ڈی سی موٹرز جڑتا کے ل tor ٹورک کا ایک اعلی تناسب رکھتے ہیں ، لہذا وہ قابو میں آنے والے اشاروں میں ہونے والی تبدیلیوں کا فوری جواب دے سکتے ہیں۔ کسی ڈی سی موٹر کو آسانی سے صفر تحریک پر قابو کیا جاسکتا ہے اور پیچیدہ پاور سوئچنگ سرکٹری کی ضرورت کے بغیر مخالف سمت میں فوری طور پر تیز کیا جاسکتا ہے۔ مستقل مقناطیس برش لیس ڈی سی موٹرز عام طور پر برش کی اقسام سے زیادہ مہنگا ہوتی ہیں ، حالانکہ وہ بجلی کی کھپت اور وشوسنییتا میں فوائد فراہم کرسکتی ہیں۔
بغیر چلنے والے کے ، برش لیس موٹرز روایتی ڈی سی موٹرز سے زیادہ موثر اور تیز رفتار سے چل سکتی ہیں۔ زیادہ تر برشلیس ڈی سی موٹریں ٹراپیزوڈیل اے سی ویوفارم پر چلتی ہیں ، لیکن کچھ موٹریں سائن لہروں سے چلتی ہیں۔ سائن لہر سے چلنے والے برش لیس موٹرز کم ٹورک لہر کی مدد سے کم آپریشن کو حاصل کرسکتی ہیں ، جس سے پیسنے ، کوٹنگ ، اور سطح کی تکمیل جیسے دیگر ایپلی کیشنز کے ل ideal وہ مثالی بن جاتی ہیں۔
برش شدہ ڈی سی موٹروں کی صورت میں ، اگر آپ چاہتے ہیں کہ آپ کی موٹر بجلی کو کھونے کے بغیر سست گھومائے ، تو آپ پلس کی چوڑائی ماڈلن (پی ڈبلیو ایم) استعمال کرسکتے ہیں۔ بنیادی طور پر اس کا مطلب موٹر کو بہت تیزی سے آن اور آف کرنا ہے۔ اس طرح ، موٹر کم رفتار کے ساتھ گھومتی ہے جیسے بجلی کی دیکھ بھال کیے بغیر لوئر ولٹیج کا اطلاق ہوتا ہو۔
بنیادی طور پر ، برش شدہ ڈی سی موٹر سے تیار کردہ ٹارک بہت چھوٹا ہے اور اس کی رفتار بھی بہت مفید ہے۔ لہذا ، عام طور پر گیئر میں کمی رفتار کو کم کرنے اور ٹارک بڑھانے کے ل. استعمال کی جاتی ہے۔
3. सर्वो موٹرز ڈیجیٹل کنٹرولر کے ساتھ بند لوپ سسٹم میں استعمال ہوتی ہیں۔ کنٹرولر ڈرائیور یمپلیفائر کو رفتار کے احکامات بھیجتا ہے ، جس کے نتیجے میں امدادی موٹر کھل جاتی ہے۔ رائے کے آلے کی کچھ شکلیں ، جیسے ایک حل کرنے والا یا انکوڈر ، امدادی موٹر کی پوزیشن اور اس کی رفتار سے متعلق معلومات فراہم کرتا ہے۔ حل کرنے والا یا انکوڈر موٹر کے ساتھ مربوط ہوسکتا ہے یا دور سے واقع ہے۔ بند لوپ سسٹم کی وجہ سے ، ایک सर्वो موٹر ایک مخصوص موشن پروفائل کے ساتھ چل سکتی ہے جو کنٹرولر میں پروگرام کیا ہوا ہے۔
4. اسٹیپر موٹرز چھوٹے کونییئر مراحل میں ٹوٹ جانے والی موٹر کی گردش کے ساتھ ، رائے کے بغیر یا اس کے بغیر کام کرسکتی ہیں۔ یہ سپند کمانڈ سگنلز کے ذریعہ کنٹرول کیا جاتا ہے ، اور کسی کمانڈ پوائنٹ پر بریک یا کلچ اسمبلیوں کی ضرورت کے بغیر بالکل روک سکتا ہے۔ جب بجلی کو ہٹا دیا جاتا ہے ، تو مستقل مقناطیس والی اسٹیپر موٹر عام طور پر اپنی آخری حالت میں رہتی ہے۔ متعدد اسٹیپر موٹرز کو عام مآخذ سے چلا کر ہم وقت سازی میں برقرار رکھا جاسکتا ہے۔
دیو دیسائی
مارکیٹنگ ایگزیکٹو 
اگر آپ روبوٹکس میں شامل ہونے کا ارادہ رکھتے ہیں تو ، آپ کو خود کو دستیاب متعدد قسم کی موٹروں سے واقف کرنے کی ضرورت ہوگی ، تمام روبوٹکس کی نقل و حرکت ایک طرح سے یا کسی دوسرے انداز میں چلائی جاتی ہے ، لہذا یہ جاننا ضروری ہے کہ آپ کا اختیار کیا ہے۔
ڈی سی موٹرز
بیٹری سے چلنے کے علاوہ ، ڈی سی موٹر کی نقل و حرکت کی سمت بجلی کے ان پٹ کی قطعی حیثیت سے طے کی جاتی ہے۔ یہ روبوٹک افعال کی قطعی ضرورت ہے۔ خوش قسمتی سے ، اس قسم کی موٹر مختلف قسم کے سائز ، وولٹیج کی ضروریات میں آتی ہے ، اور ہر جگہ دستیاب ہے۔
مختلف قسم کی موٹریں ذیل میں ہیں
- موبلٹی بیس موٹر
- تیز رفتار شوق موٹر
- بیلٹ ڈرائیو موٹر
- سلاٹ کار موٹر
- نبض چلتی تھی
- بازو سے ملنے والی موٹر
- پوائنٹر کے ساتھ بائپولر اسٹیپر
بائیو موٹر
بائیو میٹل ایک حیرت انگیز مادہ ہے جو کچھ سالوں سے جاری ہے اور اس میں روبوٹکس کے شعبے میں متعدد استعمال ہیں۔ ہم مثال میں دیکھ سکتے ہیں ، کہ بائیو میٹل تار کا ایک ٹکڑا اس کی لمبائی کا پانچ فیصد سکڑ جائے گا جب اس کے پار صرف چند وولٹ لگائے جائیں گے۔ کئی سالوں کی جانچ کے بعد ، بائیو وائر مضبوط ، قابل اعتماد ثابت ہوا ہے ، اور نئی مصنوعات کے ابھرتے ہی یہ زیادہ کارآمد ہوتا جارہا ہے۔ اس کا قدرے کم ردعمل کا وقت روبوٹک بازو اور ہاتھوں کی ایپلی کیشنز کے ل. یہ مثالی بنا دیتا ہے ، جہاں جرکنا پریشانی کا باعث ہوگا۔ جب روبوٹ بازو کی پوری لمبائی بڑھ جاتی ہے تو تار کا ایک لمبا ٹکڑا ایک اہم حرکت پیدا کرسکتا ہے۔ کمرشل مارکیٹ میں اس وقت روبوٹک آرم کٹس موجود ہیں جو بائیو میٹل کو استعمال کرتی ہیں۔
ریلے
روبوٹکس میں ، ریلے تقریبا almost ہمیشہ موٹرز کے لئے استعمال ہونے والی طاقت کو کمپیوٹر فنکشن کے لئے بجلی کی فراہمی سے الگ کرنے کے لئے استعمال کیا جاتا ہے۔ موٹرز ، اپنی کم رکاوٹ کی وجہ سے ، بجلی کی فراہمی پر بھاری موجودہ مطالبات کرتے ہیں اور متعدد خامیاں پیدا کرتے ہیں جو کمپیوٹر برداشت نہیں کرسکتے ہیں۔ لہذا صرف موٹروں کے ل a الگ الگ موجودہ ماخذ کا استعمال کرنا ایک اچھا خیال ہے۔
سولینائڈز
سولینائڈز ہیرا پھیری کنٹرول ڈیوائسز یا سوئچ آپریٹرز کے طور پر بہترین استعمال ہوتے ہیں۔ ان کی نقل و حرکت تیز اور مضبوط ہے ، لہذا عمل کو نرم کرنے کے لئے ایک بہار تقریبا ہمیشہ graspers میں استعمال کیا جاتا ہے۔ جیسا کہ آپ مثال کے طور پر دیکھ سکتے ہیں ، کنٹرولر تاروں کو گرفت کو بند کرنے کے لئے استعمال کیا جاتا ہے۔ یہ کنٹرول تاروں واپسی کے چشموں کا بھی کام کرسکتی ہیں۔ اس طرح کے گیسپرز کو پروڈکشن لائن ورک میں زیادہ پایا جاتا ہے جہاں کام بہت ناپا جاتا ہے اور اس میں تنگ پیرامیٹرز کا احاطہ کیا جاتا ہے۔
ثانوی کام
زیادہ تر موٹر افعال میں نقل و حرکت ، بازو ، سر ، یا کچھ دیگر دکھائی دینے والی بیرونی حرکت شامل ہوتی ہے ، تاہم ، کچھ موٹر حرکتیں اتنی نظر نہیں آتی ہیں۔ بڑے صنعتی روبوٹ ہائیڈرولک سسٹم استعمال کرتے ہیں جو ہائیڈرولک سیال کے آپریٹنگ پریشر کو تیار کرنے کے لئے پمپ موٹرز کا استعمال کرتے ہیں۔ موٹروں کا ایک اور اہم ثانوی کام ایڈجسٹمنٹ ہے۔ درستگی کو بہتر بنانے کے ل pot ، پوٹینومیٹر جو موٹروں کے ساتھ انٹرفیس ہوتے ہیں وہ عام طور پر ملٹی ٹرن آلہ ہوتے ہیں۔
نتیجہ اخذ کرنا
روبوٹ بہت پیچیدہ ڈیوائسز ہوسکتے ہیں جو متعدد موٹر سے چلنے والی حرکتوں کی ضرورت ہوتی ہے۔ اس مضمون کا مطلب یہ ہے کہ آپ روبوٹ بنانے والے کی حیثیت سے ان ڈیوائسز کی حدود کا جائزہ لیتے ہو جن سے آپ معاملات کر سکتے ہیں۔ روبوٹک سازوسامان فراہم کرنے والوں اور دستیاب فراہمی پر تحقیق کر کے آغاز کرنا اچھا خیال ہوگا۔ ابھی بہت ساری مصنوعات دستیاب ہیں اور انٹرنیٹ تلاش کرنا ، اس کے بارے میں جاننا اور استعمال کرنا آسان بنا دیتا ہے۔ آپ کی ضروریات کچھ بھی ہوں ، تھوڑی سی آسانی اور عزم جو روبوٹ بنانے والوں کو لگتا ہے آپ کی اچھی طرح خدمت کرنی چاہئے۔
سمدان وانڈری
مارکیٹنگ ایگزیکٹو
'روبوٹکس میں استعمال ہونے والی موٹریں'
- موبلٹی بیس موٹر

- تیز رفتار شوق موٹر
- بیلٹ ڈرائیو موٹر
- سلاٹ کار موٹر
- نبض چلتی تھی
- بازو سے ملنے والی موٹر
- پوائنٹر کے ساتھ بائپولر اسٹیپر

نقل و حرکت کے اڈوں کے لئے بڑی موٹریں بہترین موزوں ہیں جو روبوٹ کو علاقے کو پینتریبازی کرنے کی اجازت دیتی ہیں۔ ان میں سے کچھ موٹرز گیئر باکسز کے ساتھ آتی ہیں تاکہ نقل و حرکت کے لئے درکار سست رفتار اور ٹارک پیدا ہوتا ہے۔ موٹر پر وولٹیج کو کم کرنا بھی اس سے زیادہ مطلوبہ رفتار کو سست کرسکتا ہے۔ صرف تجربے سے ہی معلوم ہوسکتا ہے کہ آیا آپ کی موٹر کم وولٹیج کے ساتھ چلتی ہے۔ اگر ایسا ہوتا ہے تو ، آپ نے خود کو بہت پریشانی سے بچا لیا ہے ، اگر نہیں تو ، موٹرز کو سست کرنے کے اور بھی طریقے ہیں۔ اگر کیڑا گیئرز یا سکرو گیئر استعمال کیے جائیں تو کچھ تیز رفتار موٹریں استعمال کی جاسکتی ہیں۔
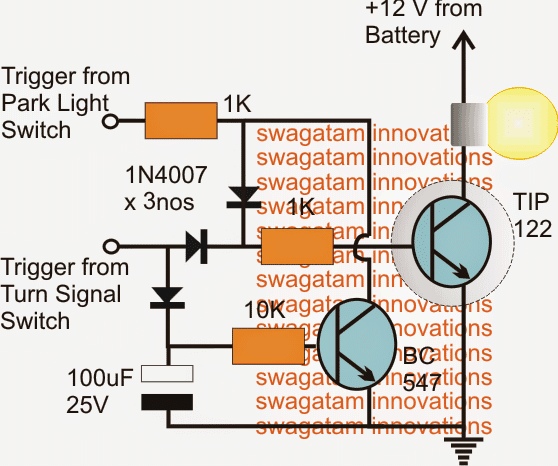
روبوٹک بازو کی مثال میں سکرو گیئر کی مثال دیکھی جاسکتی ہے۔ جب موٹر گھڑی کی سمت موڑ دیتی ہے تو بولٹ اسمبلی موٹر اور بازو کے معاہدوں کی طرف کھینچ لی جاتی ہے اور جب یہ گھڑی کی سمت سے کاؤنٹر ہوجاتی ہے تو بازو بڑھ جاتا ہے۔ اگرچہ موٹر شافٹ تیزی سے مڑتا جارہا ہے ، لیکن سکرو میں کمی کی وجہ سے بازو کا عمل کافی آہستہ ہے۔ مندرجہ ذیل موٹر سرکٹ عکاسی میں ، ہم پاور ٹرانجسٹر کے ذریعہ ڈی سی موٹر کنٹرول شدہ دیکھتے ہیں۔ ایک ریلے سوئچ (ڈبل قطب ڈبل تھرو) ، سمت کا تعین کرتا ہے۔ ٹرانجسٹر کیو 1 موٹر کا بھاری بوجھ لینے کے ل power ایک پاور ٹرانجسٹر ہونا چاہئے۔
پلسڈ موٹرز
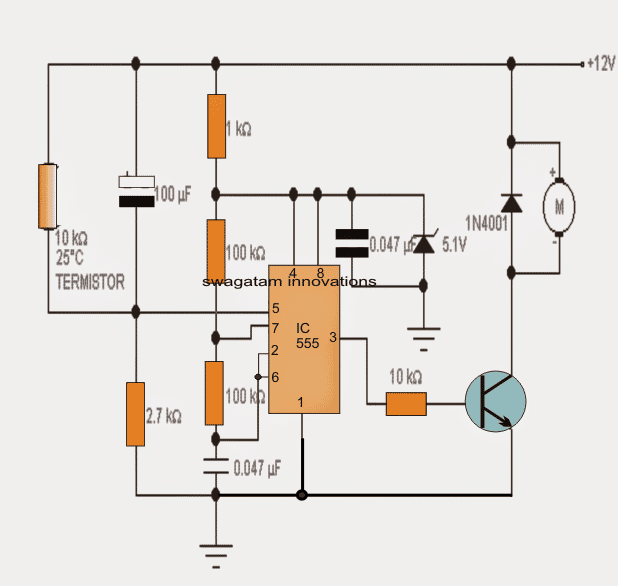
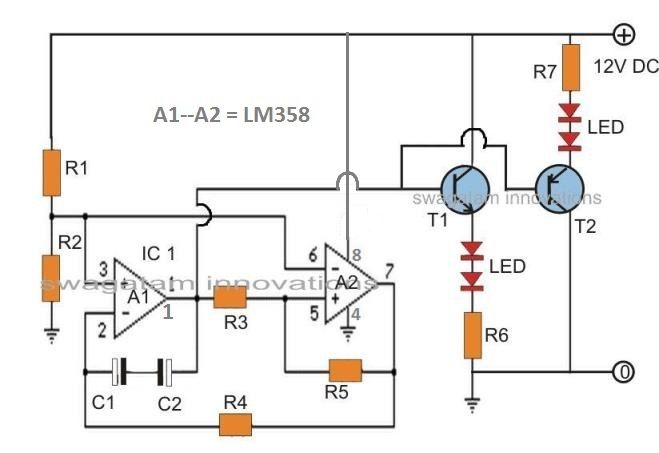
کچھ موٹرز سپلائی شدہ DC سگنل سے کام کر کے رفتار میں کمی لاتی ہیں۔ یہ سگنل عام طور پر تقریبا ایک سو ہرٹج ہے۔ پلس کی چوڑائی کو تبدیل کرکے نہیں ، نبض کی فریکوئینسی تبدیل کرکے موٹر کی رفتار کو تبدیل کیا جاسکتا ہے۔ ان جیسی موٹرز سرپلس الیکٹرانکس کی دکانوں میں پائی جاسکتی ہیں اور اس سے منسلک نبض جنریٹر آسانی سے پہچان سکتی ہیں۔ کسی بھی ڈی سی موٹر کو نبض کے ذریعہ کارفرما کیا جاسکتا ہے ، اور اس طرح کے سرکٹ کا ایک اسکیماتی شامل ہے۔
جیسا کہ آپ دیکھ سکتے ہیں کہ 555 ٹائمر کو ڈرائیو آسکیلیٹر کے طور پر منتخب کیا گیا تھا ، جو تقریبا 100 ہرٹج کی تعدد پیدا کرتا ہے۔ ریزسٹر آر 1 ، اور کپیسیٹر سی ، نبض جنریٹر کو موٹر کے ذریعہ تیار کردہ اسپائکس سے مستحکم اور الگ کریں۔ چونکہ یہ آلہ 6 سے 12 وولٹ کی بجلی کی فراہمی سے اپنی طرف متوجہ کرسکتا ہے ، لہذا آپ بہتر نتائج کے ل cap کپیسیٹر سی 4 اور سی 6 کی قیمت کو تبدیل کرنا چاہیں گے ، اس پر منحصر ہے کہ آپ کس وولٹیج کا استعمال کرتے ہیں۔ پلس آؤٹ پٹ کو آئی سی 1 کے تین پن سے لیا جاتا ہے اور اسے آئی سی 2 کے دو پن کو کھلایا جاتا ہے ، ایک 555 ٹائمر بھی۔
دوسرا ٹائمر وولٹیج کو ایڈجسٹ کرکے نبض کی چوڑائی کو مختلف کرتا ہے جو پوٹینومیٹر R5 اور ریزٹر R6 کے ذریعہ کاپاکیٹر سی 6 کو کھلایا جاتا ہے۔ نبض کی مدت وہ ہوتی ہے جو موٹر کی رفتار کا تعین کرتی ہے اور نبض کی چوڑائی 10٪ سے 100٪ میں ایڈجسٹ کی جاسکتی ہے۔
ٹرانجسٹر Q1 نال کی چوڑائی ماڈیولیٹڈ سگنل حاصل کرتا ہے مزاحم R7 کے ذریعے۔ چونکہ کیو 1 ایک کم موجودہ ڈیوائس ہے ، لہذا ، یہ سگنل کیو 2 کو منتقل کرتا ہے ، جو پاور ٹرانجسٹر ہے جو موٹر کے حالیہ مطالبات کو سنبھال سکتا ہے۔ یہ ٹرانجسٹر اہم نہیں ہیں اور تقریبا almost کسی بھی طرح کے کم موجودہ پاور ٹرانجسٹر کام کریں گے۔ ریلے اس بات کا تعین کرے گی کہ موٹر کس سمت لے گی۔
اسٹپر موٹرز
تمام موٹروں میں سب سے زیادہ پیچیدہ اسٹیپر موٹر ہے۔ نام انفیرس کی طرح موٹر بھی ڈگری انکریمنٹ میں تبدیل ہوجاتا ہے اور اس میں پلس چلتی ہے۔ فی مرحلہ موڑ کی صحیح ڈگری ایک صنعت کار یا ماڈل سے دوسرے میں مختلف ہوسکتی ہے ، لیکن 20 ڈگری مقبول ہے اور ایک مکمل موڑ کے لئے 18 قدم تیار کرتی ہے۔ اسٹپر موٹرز کی دو بنیادی اقسام ہیں ، دوئبرووی اور ایک پولر۔ جیسا کہ آپ اسٹپر موٹر سکیمیٹک میں دیکھ سکتے ہیں ، دو قطبی محض دو کنڈلی سے چلنے والی موٹر ہے۔
یونی پولر ٹائپ دو کنڈلی ہے جن میں سینٹر ٹیپس ہیں۔ اگر مرکز کے نلکوں کو نظرانداز کردیا گیا تو ، یک قطبی موٹر موٹر بائپولر کی طرح کام کرسکتی ہے۔ ایک کھڑی موٹر میں موجود دونوں کنڈلی کو کنڈلی سے کنڈلی تک قطبی طور پر مرحلہ وار دالیں کھلا دی جاتی ہیں۔ اس عمل کا نقشہ کام کرنے والے آریگرام میں فراہم کیا گیا ہے تاکہ موٹر ایکشن کو گرافیکل انداز میں نمائندگی کیا جاسکے۔ روایتی ڈی سی موٹروں کے برعکس ، ٹارک رفتار کے ساتھ کم ہوتا ہے۔ ایک خاص قسم کی ڈرائیو یونٹ بھی ضروری ہے کہ وہ سٹیپر موٹر کو آگے بڑھا سکے اور موٹر کے ساتھ فراہم کی جانی چاہئے۔ یہ تجویز نہیں کیا جاتا ہے کہ آپ ایک کنٹرول یونٹ بنائیں جب تک کہ موٹر کو کسی اچھ specی شیٹ کی فراہمی نہ ہو جس میں جزو کی سفارشات اور مکمل اسکیمیٹک ہو۔
موٹر کو بفروں کو ڈرائیو سسٹم سے الگ کرنے کی ضرورت پڑسکتی ہے ، یا اس کے لئے الگ بجلی کی فراہمی کی ضرورت پڑسکتی ہے۔ جو بھی ضروریات ہیں ، وہ ایک موٹر سے دوسری موٹر میں کافی مختلف ہوسکتی ہیں۔ شوق کی دکانیں اسٹپر موٹرز کا سب سے معتبر سپلائر ہیں ، اور اگرچہ اضافی الیکٹرانک اسٹور کبھی کبھار ان کے پاس ہوسکتے ہیں ، لیکن اس میں وہ ضروری معلومات شامل نہیں کرسکتے ہیں۔
جزوی موڑ والی موٹریں
کچھ روبوٹک افعال میں صرف جزوی موڑ کی ضرورت ہوتی ہے ، جیسے سر یا بازو کی حرکتیں۔ ان کو حاصل کرنے کا آسان ترین طریقہ یہ ہے کہ پوزیشن رک جائے اور پرچی گئیر ہو۔ اس قسم کی موٹر کی مکینیکل تفصیلات کی ایک مثال اوپر دی گئی ہے۔ مائکرو سوئچز کو اسٹاپ سینسر کے طور پر استعمال کیا جاسکتا ہے تاکہ بجلی بند کی جاسکے اور اگلی کارروائی کیلئے سمت دوبارہ ترتیب دی جاسکے۔
نچلے پہیے کو موٹر سے منسلک کیا جاتا ہے جبکہ اوپر والا پہی theہ احساس کے ایک سرکلر ٹکڑے سے نیچے پہیے سے جدا ہوتا ہے۔ جب نیچے کا پہیا موڑ دیتا ہے تو جب تک اسٹاپ پن مائیکرو سوئچ کے ساتھ رابطے میں نہیں آتا اس وقت تک پہی wheelا پہی itے کے ساتھ موڑ جاتا ہے۔ کچھ ڈیزائن موٹر کو روکنے کے لئے کوئی انتظام نہیں کرتے ہیں ، لہذا اسپیسرز کے ساتھ آسان پیچ موٹر اسٹاپ کے ساتھ ہی کام کریں گے۔
بائیو موٹر
بائیو میٹل ایک حیرت انگیز مادہ ہے جو کچھ سالوں سے جاری ہے اور اس میں روبوٹکس کے شعبے میں متعدد استعمال ہیں۔ ہم مثال میں دیکھ سکتے ہیں ، کہ بائیو میٹل تار کا ایک ٹکڑا اس کی لمبائی کا پانچ فیصد سکڑ جائے گا جب اس کے پار صرف چند وولٹ لگائے جائیں گے۔ کئی سالوں کی جانچ کے بعد ، بائیو وائر مضبوط ، قابل اعتماد ثابت ہوا ہے ، اور نئی مصنوعات کے ابھرتے ہی یہ زیادہ کارآمد ہوتا جارہا ہے۔ اس کا قدرے کم ردعمل کا وقت روبوٹک بازو اور ہاتھوں کی ایپلی کیشنز کے ل. یہ مثالی بنا دیتا ہے ، جہاں جرکنا پریشانی کا باعث ہوگا۔ جب روبوٹ بازو کی پوری لمبائی بڑھ جاتی ہے تو تار کا ایک لمبا ٹکڑا ایک اہم حرکت پیدا کرسکتا ہے۔ کمرشل مارکیٹ میں اس وقت روبوٹک آرم کٹس موجود ہیں جو بائیو میٹل کو استعمال کرتی ہیں۔
بھاسکر سنگھ
مارکیٹنگ ایگزیکٹو
 صنعتی روبوٹ وہ آلات ہیں جو ایک خاص حد تک خطرے میں کمی کے ساتھ انسانی تحریک کی نقل تیار کرتے ہیں ، جس سے زیادہ طاقت ، درستگی اور تسلسل فراہم ہوتا ہے۔ ان کو آپریشنل طریقوں ، کنٹرولنگ ، استعمال شدہ ٹولز اور کارکردگی کا مظاہرہ کرنے کے لئے کام پر منحصر ہوکر موٹر چلانے والی نقل و حرکت کی ایک وسیع حد کی ضرورت ہے۔ ایک صنعتی روبوٹک موٹر میں کسی خاص کام میں مہارت حاصل کرنے کے ل normal عام موٹروں کے مقابلے میں وسیع پیمانے پر فرائض سنبھالنے کی صلاحیت ہونی چاہئے۔
صنعتی روبوٹ وہ آلات ہیں جو ایک خاص حد تک خطرے میں کمی کے ساتھ انسانی تحریک کی نقل تیار کرتے ہیں ، جس سے زیادہ طاقت ، درستگی اور تسلسل فراہم ہوتا ہے۔ ان کو آپریشنل طریقوں ، کنٹرولنگ ، استعمال شدہ ٹولز اور کارکردگی کا مظاہرہ کرنے کے لئے کام پر منحصر ہوکر موٹر چلانے والی نقل و حرکت کی ایک وسیع حد کی ضرورت ہے۔ ایک صنعتی روبوٹک موٹر میں کسی خاص کام میں مہارت حاصل کرنے کے ل normal عام موٹروں کے مقابلے میں وسیع پیمانے پر فرائض سنبھالنے کی صلاحیت ہونی چاہئے۔
انتہائی موثر پاور سورسنگ اور نسبتا simple آسان ڈیزائننگ کی وجہ سے الیکٹرک موٹرز صنعتی روبوٹکس میں عام طور پر استعمال ہوتی ہیں جس کی وجہ سے وہ ہر پہلو میں لاگت سے کارکردگی کی درجہ بندی میں انسٹال ، دیکھ بھال اور خدمات انجام دینے کے لحاظ سے زیادہ مقبول آپشن بناتا ہے۔
ضروری کام پر منحصر ہے ، مختلف موٹریں مختلف مقاصد کے لئے استعمال کی جاتی ہیں۔ مثال کے طور پر ڈی سی موٹرز گھڑی کی سمت اور اینٹلائک سمتوں میں حرکت کے ل are استعمال ہوتی ہیں ، مثالیں کرینوں اور لہرانے میں ہیں ، سپندت والی موٹریں ڈی سی پلس کی چوڑائی کا استعمال کرتے ہوئے نبض کی حرکتیں فراہم کرنے کے ل are استعمال ہوتی ہیں ، جزوی موڑ والی موٹرز سر اور بازو کی طرح حرکت دینے کے ل are استعمال ہوتی ہیں اور انتہائی پیچیدہ - اسٹیپر موٹرز ڈگری انکریمنٹ میں تیز موڑ فراہم کرنے کے لئے استعمال ہوتی ہیں۔
مزید برآں ، کام کی نوعیت پر منحصر ہے ، مختلف درجہ بندی اور سائز والے موٹرز مختلف مقاصد کے ل are استعمال ہوتی ہیں۔ کام اور روبوٹ ڈیزائن کے لحاظ سے مختلف مقامات پر مختلف درخواستیں رکھنے والی موٹروں کی متعدد قسمیں ہیں۔
موہن کرشنا۔ ایل
سیلز اینڈ سپورٹ ایگزیکٹو
روبوٹ کو وہ کام کرنے کے لئے استعمال کیا جاتا ہے جو انسان کر سکتے ہیں اور اس کی بہت ساری وجوہات ہیں کہ روبوٹ انسانوں سے بہتر ہیں۔ 
روبوٹ کی دو اہم اقسام ہیں وہ یہ ہیں: -
موبائل روبوٹ: جو پیروں یا پٹریوں پر چلے جاتے ہیں۔
اسٹیشنری روبوٹ: اس کا ایک مستقل اڈہ ہے۔
اسٹیشنری روبوٹ عام طور پر روبوٹ اسلحہ اشیاء استعمال کرنے یا کوئی اور کام کرنے کے لئے استعمال ہوسکتے ہیں جس میں کسی چیز تک پہنچنا شامل ہوتا ہے۔
ایک روبوٹ بازو کے تین بنیادی حصے ہیں: -
- کندھے کا جوڑ
- کلائی مشترکہ
- فکسڈ بیس
کے لئے روبوٹ کی ضرورت ہے
- تیز اور مضر ماحول کام کرنے کی صلاحیت۔
- بار بار کاموں کو دہرانے کی اہلیت۔
- درست کام کرنے کی صلاحیت۔
- مختلف کام کرنے کی صلاحیت۔
- کارکردگی.
موٹر ایک ایسا آلہ ہے جو برقی توانائی کو میکانی توانائی میں تبدیل کرتا ہے ، یعنی الیکٹرو مکینیکل ڈیوائس۔ دو اقسام کی موٹریں ایسی ہیں جیسے AC موٹر اور DC موٹر۔
صنعتی روبوٹکس میں استعمال ہونے والی موٹر ، सर्वो موٹر ہے۔ امدادی موٹر ایک سیدھی سادہ برقی موٹر ہے جو امدادی میکینزم کی مدد سے کنٹرول کی جاتی ہے۔ اگر کنٹرول شدہ موٹر اے سی کے ذریعہ چلائی جاتی ہے تو اسے اے سی سروو موٹر کہا جاتا ہے بصورت دیگر ڈی سی سروو موٹر۔ زیادہ تر موٹرس موٹرس تقریبا 90 90 سے 180 ڈگری تک گھوم سکتی ہیں۔ پھر بھی کچھ گھومتے ہیں۔ ایک مکمل 360 ڈگری یا اس سے زیادہ۔ روبوٹکس میں امدادی موٹر کی کچھ ایپلی کیشنز ہیں
- روبوٹک میں سرو موٹر موٹر ایپلیکیشن ، یعنی ایک سادہ چن اور جگہ رکھنے والا روبوٹ ، یہ ایک پوزیشن سے کسی چیز کو چننے اور چیز کو مختلف پوزیشن پر رکھنے کے لئے استعمال ہوتا ہے۔
- کنویرز میں سروو موٹر استعمال ہوتی ہے
- صنعتی مینوفیکچرنگ اور اکائیبلنگ یونٹوں میں تاکہ کسی شے کو ایک اسمبلی اسٹیشن سے دوسرے اسمبلی میں منتقل کیا جاسکے۔ سابق کے لئے: - بوتل بھرنے کا عمل۔
- روبوٹک گاڑی میں सर्वो موٹر یہاں پہیے میں استعمال ہونے والی سروو موٹر۔ چونکہ مستقل گھماؤ امدادی موٹر استعمال کی جاتی ہے۔
دنیش.پی
مارکیٹنگ ایگزیکٹو
 انسانوں کی محنت کو کم کرنے اور مستقبل میں ہونے والی پیشرفتوں کے ل humans انسان کو خوش قسمتی پیدا کرنے میں مدد دینے کے ل Rob روبوٹ متعارف کروائے گئے ہیں۔ روبوٹ اصطلاح سے مراد وہ مشین ہے جو مختلف انسانی خصوصیات کی نقالی کرتی ہے۔ روبوٹکس میں مکینیکل ، الیکٹرانکس ، الیکٹریکل اور کمپیوٹر سائنس انجینئرنگ کا علم شامل ہے۔ روبوٹ میں استعمال ہونے والی موٹرز ڈی سی موٹرز ، اسٹیپر موٹرز اور سروو موٹرز ہیں
انسانوں کی محنت کو کم کرنے اور مستقبل میں ہونے والی پیشرفتوں کے ل humans انسان کو خوش قسمتی پیدا کرنے میں مدد دینے کے ل Rob روبوٹ متعارف کروائے گئے ہیں۔ روبوٹ اصطلاح سے مراد وہ مشین ہے جو مختلف انسانی خصوصیات کی نقالی کرتی ہے۔ روبوٹکس میں مکینیکل ، الیکٹرانکس ، الیکٹریکل اور کمپیوٹر سائنس انجینئرنگ کا علم شامل ہے۔ روبوٹ میں استعمال ہونے والی موٹرز ڈی سی موٹرز ، اسٹیپر موٹرز اور سروو موٹرز ہیں
کہاں،
- ڈی سی موٹرز کو مستقل گھماؤ کے لئے استعمال کیا جاتا ہے
- اسٹیپر موٹرز کو کچھ ڈگری پر گھماؤ کے لئے استعمال کیا جاتا ہے
- سروو موٹرز کو پوزیشننگ کے لئے استعمال کیا جاتا ہے ، یہ کاروں اور طیاروں میں استعمال ہوسکتا ہے
گنیش .J
مارکیٹنگ ایگزیکٹو 
روبوٹ کو وہ کام کرنے کے لئے استعمال کیا جاتا ہے جو انسان ہی کرسکتا ہے اور انسانی کوششوں اور وقت کو بھی کم کرتا ہے اور معیار کو بہتر بناتا ہے۔ صنعتی روبوٹکس میں استعمال ہونے والے موٹرز یہ ہیں
- باری باری موجودہ (AC) موٹرز
- براہ راست موجودہ (DC) موٹرز
- امدادی موٹریں
- اسٹپر موٹرز۔