اس پوسٹ میں ہم اس ضمن میں یہ سمجھنے کی کوشش کریں گے کہ کس طرح زیادہ سے زیادہ کے حصول اور مفت توانائی کی شکل میں بجلی پیدا کرنے کے لئے ایک لاکٹ میکانزم کا استعمال کیا جاسکتا ہے۔
لاکٹ ورکنگ اصول
ہم سب جانتے ہیں اور عملی طور پر دیکھ چکے ہیں کہ کس طرح ایک لاکٹ کام کرتا ہے یا چکنا چور ہوتا ہے۔ تکنیکی طور پر اس کی تعریف کسی شافٹ سے بنی ایک میکانزم کے طور پر کی جا سکتی ہے جس کے وزن اس کے نچلے سرے پر لٹکا ہوا ہوتا ہے ، اور شافٹ کے اوپری سرے کو ایک مقررہ محور پر لٹکا دیا جاتا ہے ، جیسے جب جب وزن کو دستی دھکا دیا جاتا ہے تو ، شافٹ ہوتا ہے پس منظر میں جھومنے والی تحریک کے ساتھ مجبور کیا گیا ہے جس میں وزن کے اختتام کے مقابلے میں اہم نقطہ کم سے کم یا ایک صفر نقل مکانی کا تجربہ کرتا ہے جو زیادہ سے زیادہ رشتہ دار نقل مکانی سے گزرتا ہے جبکہ دوپنا جاری ہے۔
لاکٹ کو انتہائی موثر میکانزم میں سے ایک سمجھا جاسکتا ہے ، بالکل اسی طرح لیور میکانزم جس میں 'کام' آؤٹ پٹ تیار کرنے کی صلاحیت موجود ہے جو ان پٹ پر ہونے والے 'کام' سے کہیں زیادہ ہوسکتی ہے۔
اس کی گواہی اس حقیقت سے بھی دی جاسکتی ہے کہ ایک لاکٹ ایک لمبے عرصے تک مضبوط جھومنے والی کارروائی کو برقرار رکھنے کے قابل ہے یہاں تک کہ اس پر دستی دباؤ کے ذریعہ ایک معمولی طاقت کا اطلاق ہوتا ہے۔ پینڈولم کے ذریعہ ان پٹ اور آؤٹ پٹ کام کا اعلی تناسب نظام پر کام کرنے والی دو بیرونی قوتوں ، یعنی کشش ثقل قوت اور کانٹرافوگال قوت کی وجہ سے حاصل کیا جاتا ہے۔
ان پٹ آؤٹ پٹ ورک کا تناسب
اس آسان مثال کا مطالعہ کرکے آؤٹ پٹ ورک ریشو کے ان پٹ کا اندازہ لگایا جاسکتا ہے۔
فرض کریں کہ اس کی کشش ثقل کے مرکز میں ایک لاکٹ باقی ہے۔ فرض کریں کہ کسی بیرونی دھکا کو لاکٹ کے بڑے پیمانے پر لاگو کیا جاتا ہے جیسے کہ یہ کچھ کونیی اوپر والی حرکت کے ساتھ 4 انچ کا فاصلہ تک بے گھر ہوجاتا ہے ، تاہم کشش ثقل کے اثر کی وجہ سے ماس اپنی پوزیشن کو بحال کرنے کی کوشش کرتا ہے اور اس عمل میں لاکٹ گزر جاتا ہے ایک متضاد تحریک اس وقت تک جب تک کہ وہ اپنے مرکز کشش ثقل کے مرکز تک نہ پہنچ جا، ، لیکن اس انتہائی حد تک انتہائی کم رگڑ کی وجہ سے بڑے پیمانے پر کشش ثقل کے مرکز کو روکنے میں ناکام رہتا ہے اور کشش ثقل کے مرکز کو عبور کرتے ہوئے حرکت جاری رکھنے پر مجبور ہوجاتا ہے۔ جب تک کہ یہ دوسرے انتہائی اختتام تک نہ پہنچ جائے ، اور اس عمل کی رو سے دوائیوں کی صورت اختیار کرلی جائے۔
پینڈولم میں پوشیدہ زیادتی کا اندازہ لگانا
آئیے فرض کیجئے کہ ابتدائی دستی قوت جس میں پینڈولم کی جگہ ہے ، تقریبا 4 4 انچ ہے ، اور پھر جب ہم بھی اس طرح کے کٹتے ہوئے ہیں تو ، ہم آہستہ آہستہ بوسیدہ فیشن میں اس کے نتیجے میں ہونے والی نقل و حرکت کو پینڈلم سے باہر لے جانے کا اندازہ لگا سکتے ہیں۔
0 سے 4 (ابتدائی دھکا)
پھر 4 سے 0 ، اور پھر دوسرے سرے پر 0 سے 3 تک ،
پھر 3 سے 0 ،
پھر 0 سے 2 ،
پھر 2 سے 0 ،
پھر 0 سے 1 ،
اور آخر میں 1 سے 0 (پینڈولم رک جاتا ہے)۔
آؤٹ پٹس کو شامل کرنے سے ہم 4 3 3 + 3 + 2 + 2 + 1 + 1 = 16 4 کے دھکے کے جواب میں پائے جاتے ہیں ، اس سے یہ ظاہر ہوتا ہے کہ اس پٹ آؤٹ پٹ سے 4 گنا زیادہ ہے۔
پینڈلم ڈرا بیک
تاہم ، پینڈولم کی ایک خرابی یہ ہے کہ بالکل کسی دوسرے میکانزم کی طرح یہ بھی تھرموڈینامکس کے پہلے قانون کے ذریعہ بہت حد تک محدود ہے ، اور اسی وجہ سے اس کا جھولنا آہستہ آہستہ اس وقت تک سست ہوجاتا ہے جب تک کہ یہ اختتام تک نہ پہنچ جائے۔
بہرحال ، یہاں یہ تفتیش کرنا دلچسپ ہوگا کہ کس طرح کچھ ایسے مفید کام کرنے کے لئے پینڈولم کی انتہائی کارکردگی کو بنایا جاسکتا ہے اور یہ بھی کہ کس طرح بیرونی معمولی مقدار میں طاقت کے ذریعے مستقل مزاجی کو برقرار رکھا جاسکتا ہے۔

پینڈولم سے حد سے تجاوز کرنا
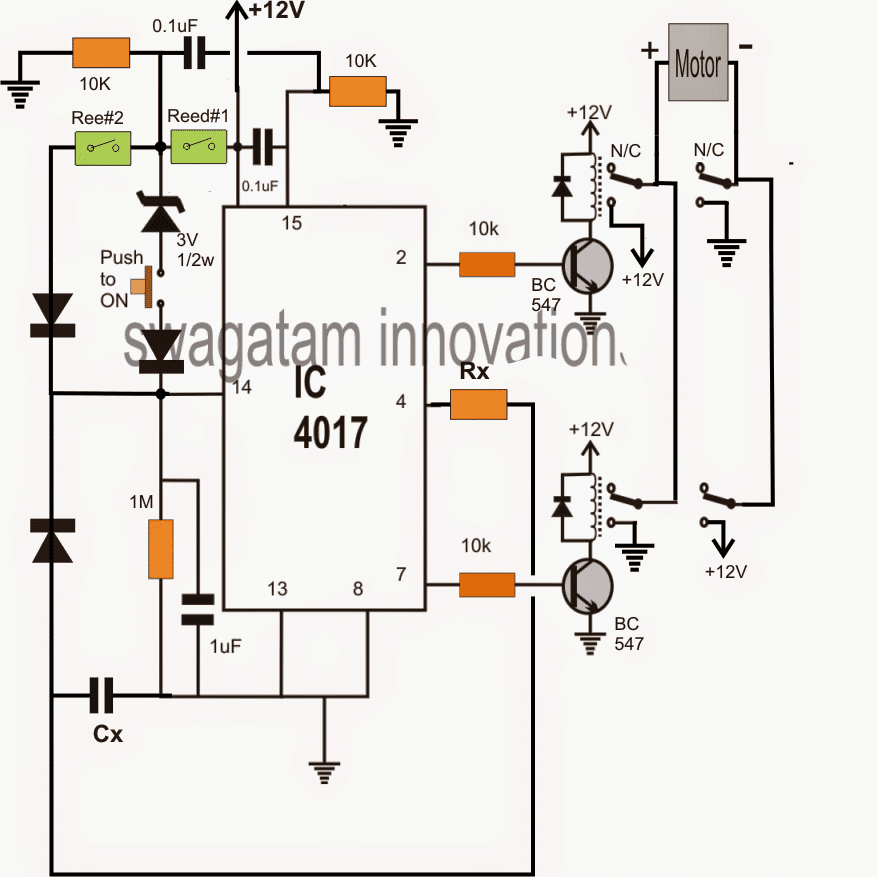
مذکورہ شبیہہ کا حوالہ دیتے ہوئے ، سیٹ اپ میں موٹر اسپینڈل سے منسلک لاکٹ شافٹ دکھاتا ہے۔ پینڈولم کی چھڑی میں ایک بھاری کروی دار وسیع پیمانے پر ہوتا ہے جس کے نچلے کنارے کے ساتھ جڑا ہوتا ہے ، بڑے پیمانے پر مستقل مقناطیس اس کے نچلے کنارے پر پھنس جاتا ہے۔
ایک سرکھنے کا سوئچ بھی پینڈولم ماس کے وسطی محور کے اندر رکھے ہوئے دیکھا جاسکتا ہے جو اپنے کشش ثقل کے مرکز کو عبور کرتا ہے ، جیسے کہ جب پینڈولم حرکت میں ہوتا ہے تو ، پینڈولم ماس پر مقناطیس ریڈ سوئچ سے ماضی صرف 'بوسے' دیتا ہے۔ ہر بار جب ایسا ہوتا ہے تو چھڑی سوئچ اپنا اندرونی رابطہ لمحہ بہ لمحہ بند کردیتا ہے اور جیسے ہی پینڈولم کو عبور کرتا ہے نکل جاتا ہے۔
موٹر تاروں کو ریلے میکانزم کے ساتھ منسلک کیا گیا ہے ، جبکہ ریڈ سوئچ کو فلپ فلاپ سرکٹ کے ساتھ تشکیل دیا گیا ہے ، جیسا کہ مندرجہ ذیل گفتگو سے معلوم کیا جاسکتا ہے:

یہ کیسے کام کرتا ہے
یہاں مقصود یہ ہے کہ موٹر کو گھڑی کی سمت اور ایک اینٹلوک وائی فاسٹ رٹیلیشن پش فراہم کرے تاکہ اس کے تکلے سے منسلک لاکٹ سوئنگ ایکشن مستقل طور پر برقرار رہے۔
یہاں موٹر ایک موٹر کی طرح کام کرتی ہے اور اس کے ساتھ ہی ایک جنریٹر بھی ہے جو پینڈول کو لات مارنے کے ل the بیٹری سے پائیدار نبض حاصل کرتا ہے ، اور بیک وقت بیٹری کے لئے بھی چارجنگ بجلی پیدا کرتا ہے ، لیکن نبض کی شرح سے کہیں زیادہ شرح پر .
مجوزہ لاکٹ آزاد توانائی جنریٹر کے سرکٹ کام کو مندرجہ ذیل نکات کی مدد سے سمجھا جاسکتا ہے:
آئی سی 4017 ایک سادہ فلپ فلاپ سرکٹ تشکیل دیتا ہے جو اپنے پن نمبر # 14 پر سرکنڈ کے سوئچ سے دالوں کے جواب میں باری باری اپنی اور بند ٹگل کرتا ہے۔
آئی سی کی آؤٹ پٹ پر متبادل آن / آف سوئچنگ اسی طرح ریلے ڈرائیور کو متحرک کرتی ہے اور ریڈ ریلے کے اس پار پینڈولم ماس کے ہر کراسنگ پر ڈی پی ڈی ٹی ریلے کو ٹوگل کرتی ہے۔
اس لمحے جب پینڈلم ماس بڑے سرے کو عبور کرتا ہے تو ، چھڑی کے رابطے قریب ہوجاتے ہیں جس کی وجہ سے آئی سی کے پن # 14 پر ٹرگر پلس ہوتا ہے جس کے نتیجے میں ریلے ٹوگل ہوجاتا ہے ، ریلے موٹر سے منسلک وولٹیج کی قطعیت کو اس طرح پلٹاتا ہے کہ نبض گھڑی کی سمت یا اینٹلوک سوز کی تکمیل کرتی ہے۔ پینڈولم کی حرکت ، اس کے ہر سوئنگ سائیکل پر تھوڑی تھوڑی کے ذریعہ پینڈولم کے جھولتے عمل کو تقویت بخشتی ہے۔
ریلے رابطوں کے ساتھ دو سیریز کیپسیٹرز کی موجودگی اس بات کو یقینی بناتی ہے کہ نبض صرف لمحہ بہ لمحہ ہے اور صرف ایک دھڑے دار توانائی کا استعمال پینڈولم کو جھولتے رہنے کے لئے استعمال کیا جاتا ہے۔
اسی اثنا میں ، پینڈولم کی حرکت بیٹری کو ایک ڈگری پر چارج رکھنے کے ل enough اتنی بجلی پیدا کرتی ہے جہاں اس کی توانائی کسی اور بیرونی گیجٹ کو طاقت دینے کے ل sufficient استعمال کرنے کے لئے کافی ہوجاتی ہے۔
پچھلا: بہتر فیول استعداد کے ل for آٹوموبائل میں HHO فیول سیل سرکٹ کیسے بنایا جائے اگلا: ایڈجسٹبی سی ڈی آئی اسپارک ایڈوانس / ریٹارڈ سرکٹ