1840 ء کی مدت میں ہی ، چارلس وہسٹ اسٹون نے لندن میں لکیری انڈکشن موٹر کی ترقی کا آغاز کیا ہے ، لیکن ایسا لگتا ہے کہ یہ ناقابل عمل ہے۔ جبکہ سال 1935 میں ، آپریٹنگ ماڈل کو ہرمن کیمپر نے ترقی میں لایا ، اور پورے سائز کا آپریٹنگ ورژن 1940 میں ایرک نے متعارف کرایا تھا۔ اس کے بعد ، اس آلے کو بہت ساری صنعتوں میں استعمال کیا گیا تھا۔ یہ مضمون واضح طور پر لکیری کی وضاحت کرتا ہے بجلی کی مقناطیسیت سے چلنے والی موٹر ، اس کے عملی اصول ، کارکردگی ، ڈیزائن ، تعمیر ، فوائد اور نقصانات اور اہم ایپلی کیشنز۔ آئیے ہم تصور میں ڈوبی ڈالیں۔
لکیری انڈکشن موٹر کیا ہے؟
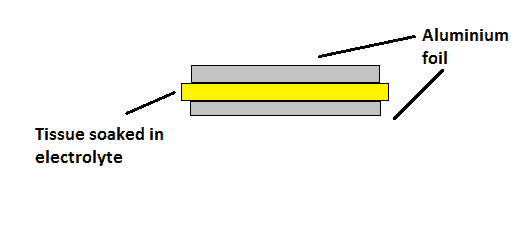
لکیری انڈکشن موٹر کا اختصار LIM کے طور پر ہوتا ہے اور یہ روٹری انڈکشن موٹر کا ایک بہتر ورژن ہے جہاں آؤٹ پٹ گھومنے والی حرکت کی جگہ لکیری ترجمہ والی حرکت ہوتی ہے۔ یہ ڈیوائس لکیری حرکت اور طاقت کو گھومنے والی ٹارک کے علاوہ پیدا کرتی ہے۔ لکیری کا ڈیزائن اور فعالیت شامل گھومنے والی انڈکشن میں یکسر شکل والے کٹ بنا کر اور اس طرح سیکشن کو برابر کرکے موٹر کو نیچے کی شکل میں دکھایا جاسکتا ہے۔
آؤٹ پٹ ایک برابر سطح کا اسٹیٹر یا اوپری طرف ہے جس میں آہنی چڑھایا پھاڑے پائے جاتے ہیں جہاں یہ تین فیز متعدد ڈنڈے سمیٹتے ہیں جن کی کنڈکٹر 90 میں ہوتی ہیں0تحریک کی سمت کا زاویہ۔ اس میں گلہری منسلک قسم کی سمیٹ پر مشتمل ہوتا ہے جب کہ عام طور پر یہ ایک لامتناہی ایلومینیم یا تانبے سے بنی شیٹ کے ساتھ شامل ہوتا ہے جسے ٹھوس چڑھایا لوہے کی حمایت پر رکھا جاتا ہے۔
اس سے قطع نظر ، آلے کے نام سے قطع نظر ، تمام لکیری انڈکشن موٹرز لکیری تحریک پیدا نہیں کرتے ہیں ، جن آلہوں میں سے کچھ تخلیق کرتے ہیں وہ بڑے قطر کے حامل انقلابات کی فراہمی کے لئے استعمال ہوتے ہیں اور نہ ختم ہونے والے پرائمری حصوں کا استعمال زیادہ مہنگا ہوتا ہے۔
ڈیزائن
بنیادی تعمیر اور لکیری شامل موٹر ڈیزائن تقریبا اسی کے مطابق تھری فیز انڈکشن موٹر ، اگرچہ یہ عام انڈکشن موٹر کی طرح ظاہر نہیں ہوتا ہے۔ جب پولیفیسکشن انڈکشن موٹر کے اسٹیٹر سیکشن میں کٹ تشکیل دیا جاتا ہے اور فلیٹ سطح پر رکھا جاتا ہے ، تو اس سے لکیری انڈکشن موٹر کا بنیادی سیکشن تیار ہوتا ہے۔ اسی طرح ، جب ایک کٹ OS پولیفیس انڈکشن موٹر کے روٹر سیکشن میں تشکیل پاتا ہے اور فلیٹ سطح پر رکھ دیا جاتا ہے ، تو اس سے لکیری انڈکشن موٹر کا سیکنڈری سیکشن ہوتا ہے۔
لکیری انڈکشن موٹر تعمیر اس کے علاوہ ، لکیری انڈکشن موٹر کا ایک اور ماڈل موجود ہے جو کارکردگی کو بڑھانے کے لئے استعمال ہوتا ہے اور اسے DLIM کہا جاتا ہے جو ڈبل رخا لکیری انڈکشن موٹر ہے۔ اس ماڈل میں ایک پرائمری سیکشن ہے جو سیکنڈری سیکشن کے دوسرے سرے پر رکھا گیا ہے۔ یہ ڈیزائن بنیادی اور ثانوی دونوں اطراف پر بہاؤ کے استعمال کو بڑھانے کے لئے استعمال کیا جاتا ہے۔ یہ ہے لکیری انڈکشن موٹر کی تعمیر .
لکیری انڈکشن موٹر کا ورکنگ اصول
مندرجہ ذیل حصے میں اس کی واضح وضاحت فراہم کی گئی ہے لکیری انڈکشن موٹر کا کام کرنا .
یہاں ، جب متوازن تین فیز طاقت کا استعمال کرکے موٹر کے پرائمری سیکشن کو تقویت ملی ہے ، تو پھر پرائمری سیکشن کی لمبائی میں بھی بہاؤ حرکت ہوگی۔ مقناطیسی فیلڈ کی یہ لکیری حرکت تین فیز انڈکشن موٹر کے اسٹیٹر سیکشن میں گھومنے والے مقناطیسی فیلڈ کے برابر ہے۔
اس کے ساتھ ، ثانوی سمیتا کے کنڈکٹر میں برقی رو بہ عمل شامل ہوگا کیونکہ کنڈکٹر کے مابین تقابلی حرکت ہوتی ہے اور بہاؤ تحریک . موجودہ قوت کا بہاؤ تحریک کے سلسلے میں ہوتا ہے یا تو طاقت کا ایک خطوط پیدا کرتا ہے اور اس کے ذریعہ دکھایا جاتا ہے
بمقابلہ = 2tfs m / سیکنڈ
جب پرائمری سیکشن کو مستقل بنادیا جاتا ہے اور دوسرے حصے میں حرکت ہوتی ہے تو پھر سیکنڈری سیکشن کو خود ہی اپنی سمت کھینچتا ہے اور اس کے نتیجے میں ضروری ریکٹر لائنر تحریک پیدا ہوتی ہے۔ جب سسٹم کو بجلی کی فراہمی فراہم کی جاتی ہے ، تو پیدا شدہ فیلڈ ایک لکیری متحرک فیلڈ فراہم کرے گا جہاں مذکورہ بالا مساوات کے مطابق رفتار کی نمائندگی کی جائے گی۔
مساوات میں ، ‘fs’ ہرٹج میں سپلائی فریکوینسی پیمائش کی مقدار سے مساوی ہے
‘بمقابلہ’ ایم / سیکنڈ میں ناپے جانے والے لکیری حرکت پذیر فیلڈ سے مساوی ہے
‘t’ لکیری قطب کی پچ سے مطابقت رکھتا ہے جس کا مطلب ہے قطب سے قطب کے درمیان فاصلہ میٹر میں ماپا جاتا ہے
V = (1-s) بمقابلہ
اسی جواز کے خط میں ، انڈکشن موٹر کی حالت میں ، ثانوی رنر وہی رفتار نہیں رکھتا جس کی رفتار کی قیمت مقناطیسی میدان . اس کی وجہ سے ، وہاں پرچی پیدا ہوتی ہے۔
لکیری شامل موٹر آریھ مندرجہ ذیل کے طور پر دکھایا گیا ہے:

لکیری انڈکشن موٹر کی خصوصیات
ایل آئی ایم کی خصوصیات میں سے کچھ یہ ہیں:
اثر ختم
سرکلر انڈکشن کی قسم کی موٹر سے مختلف ، ایل آئی ایم کی ایک خصوصیت ہے جسے 'آخر اثر' کہا جاتا ہے۔ آخری اثر کارکردگی اور کارکردگی کے نقصانات پر مشتمل ہے جو مقناطیسی توانائی کا نتیجہ ہے جو پرائمری اور ثانوی حصوں کی رشتہ دار حرکت کے ذریعہ پرائمری سیکشن کے اختتام پر چلا جاتا ہے اور گرا دیا جاتا ہے۔
صرف سیکنڈری سیکشن کے ساتھ ، ڈیوائس کی فعالیت روٹری مشین کی طرح ہی دکھائی دیتی ہے ، اس کی ضرورت ہوتی ہے کہ یہ قریب دو قطبوں کے علاوہ ہے لیکن زور میں کم سے کم بنیادی کمی ہے جو کم پرچی پر ہوتا ہے پھر بھی یہ 8 یا اس سے زیادہ ہے لمبے لمبے لمبے۔ اختتامی اثرات کے وجود کے ساتھ ، LIM ڈیوائسز روشنی کو چلانے کی صلاحیت نہیں رکھتے ہیں ، جبکہ عام قسم کی انڈکشن موٹرز کم سے کم بوجھ کے حالات میں قریب تر ہم آہنگی والے فیلڈ والی موٹر کو چلانے کی اس صلاحیت کو رکھتی ہیں۔ اس کی مخالفت کرتے ہوئے ، آخری اثر اسی خطے کو پیدا کرتا ہے جس میں لکیری موٹریں ہوتی ہیں۔
زور
LIM ڈیوائسز کی وجہ سے چلنے والی ڈرائیو تقریبا general وہی ہے جو عام انڈکشن موٹروں کی طرح ہوتی ہے۔ یہ ڈرائیو فورسز تقریبا ایک جیسے خصوصیت کے منحنی خطوط کی نمائندگی کرتی ہیں ، جتنی کہ آخری اثرات سے ماڈلیٹ ہوتی ہیں۔ اس کو ایک ٹریٹو کاوش بھی کہا جاتا ہے۔ اس کے ذریعہ دکھایا گیا ہے
F = Pg / Vs نیوٹن میں ماپا
لیویت
مزید برآں ، روٹری موٹر کے برعکس ، ایل آئی ایم ڈیوائسز میں الیکٹروڈینامک لیویٹیشن فورس ہوتی ہے جس کی صفر ’0‘ پرچی پر پڑتی ہے اور یہ تقریبا ایک مقررہ مقدار پیدا کرتی ہے جب پرچی کسی بھی سمت میں بڑھ جاتی ہے۔ یہ صرف ایک رخا موٹروں میں ہوتا ہے اور یہ خصوصیت عام طور پر اس وقت نہیں ہوگی جب لوہے کی حمایت کرنے والی پلیٹ کو ثانوی حصے کے لئے استعمال کیا جائے کیونکہ اس سے ایسی کشش پیدا ہوتی ہے جو لفٹنگ دباؤ پر قابو پالتی ہے۔
ٹرانسورس ایج اثر
لکیری انڈکشن موٹرز ٹرانسورس ایج اثر کی نمائش بھی کرتی ہیں جس کی وجہ یہ ہے کہ موجودہ راستے جو نقل و حرکت کی ایک ہی سمت میں ہیں نقصانات بڑھاتے ہیں اور ان راستوں کی وجہ سے ، موثر زور دینے میں کمی ہوگی۔ جیسا کہ اس عبور کنارے اثر ہوتا ہے.
کارکردگی
لکیری انڈکشن موٹر کی کارکردگی نیچے بیان کردہ تھیوری کے ذریعہ جانا جاسکتا ہے جہاں چلتی لہر کی ہم وقت ساز رفتار کی نمائندگی ہوتی ہے
بمقابلہ = 2f (لکیری قطب کی گہرائی) …… ..m / s
‘f’ ہرٹز میں ماپا سپلائی تعدد سے مساوی ہے
روٹری انڈکشن موٹر کی صورت میں ، ایل آئی ایم میں سیکنڈری سیکشن کی رفتار ہم وقت ساز رفتار سے کم ہے اور اس کے ذریعہ دی گئی ہے
Vr = Vs (1-s) ، ‘s’ LIM پرچی ہے اور ہے
ایس = (بمقابلہ - وی آر) / بمقابلہ
لکیری فورس کے ذریعہ دی گئی ہے
F = ہوا کے فرق کی طاقت / بمقابلہ
ایل آئی ایم کی مضبوطی والی رفتار وکر کی شکل تقریبا روٹری انڈکشن موٹر کی رفتار v / s ٹارک وکر کی طرح ہے۔ جب ایل آئی ایم اور روٹری انڈکشن موٹر کے مابین کوئی موازنہ ہوتا ہے تو ، لکیری انڈکشن موٹر کو ہوا کے بڑھتے ہوئے فرق کی ضرورت ہوتی ہے اور اس کی وجہ سے ، میگنیٹائزنگ موجودہ میں اضافہ ہوگا اور کارکردگی اور طاقت کے عنصر جیسے عوامل کم سے کم ہوں گے۔
رِم کے معاملے میں ، اسٹیٹر اور روٹر حصوں کا رقبہ ایک جیسے ہے ، جبکہ ایل آئی ایم میں ایک دوسرے حصے سے چھوٹا ہے۔ مستقل رفتار سے ، دوسرے حصے کے مقابلے میں چھوٹے حصے کا مسلسل گزرنا ہوگا۔
فوائد اور نقصانات
لکیری انڈکشن موٹر کے فوائد ہیں:
LIM کے اہم فوائد یہ ہیں:
- اسمبلی کے وقت مقناطیسی پرکشش قوتیں موجود نہیں ہیں۔ اس وجہ سے کہ LIM ڈیوائسز میں مستقل میگنےٹ نہیں ہوتے ہیں ، سسٹم اسمبلی کے وقت کوئی کشش قوت موجود نہیں ہے۔
- لکیری انڈکشن موٹرز کو لمبی لمبائی تک سفر کرنے کا فائدہ بھی حاصل ہے۔ یہ آلات بنیادی طور پر لمبی لمبائی کی ایپلی کیشنز کے لئے نافذ ہیں کیونکہ ثانوی حصے مستقل میگنےٹ کے ساتھ شامل نہیں ہیں۔ دوسرے حصے میں میگنےٹ کا عدم وجود ان آلات کو مہنگا نہیں ہونے دیتا ہے کیونکہ اس آلے کی قیمت مقناطیسی ٹریک کی نشوونما میں اہم ہے۔
- ہیوی ڈیوٹی کے مقاصد کے لئے موثر طریقے سے مفید۔ لکیری انڈکشن موٹرز بنیادی طور پر ہائی پریشر لکیری موٹر حالات میں استعمال ہوتے ہیں جہاں وہ تقریبا nearly 25 گرام تیز رفتار اور کچھ سیکڑوں پاؤنڈ کی مستحکم قوت کی درجہ بندی کے ساتھ موجود ہوتے ہیں۔
لکیری انڈکشن موٹر کے نقصانات ہیں:
- LIM ڈیوائسز کی تعمیر کچھ حد تک پیچیدہ ہے کیونکہ انہیں نفیس کنٹرول یلگوردمز کی ضرورت ہوتی ہے۔
- آپریشن کے وقت ان میں پرکشش قوتوں میں اضافہ ہوا ہے۔
- تعطل کے وقت کوئی طاقت نہیں دکھاتا ہے۔
- آلہ کی جسمانی سائز میں اضافہ کا مطلب یہ ہے کہ پیکیجنگ کا سائز زیادہ ہے۔
- فعالیت کیلئے مزید طاقت کی ضرورت ہے۔ جب مستقل میگنےٹ لکیری موٹروں سے موازنہ کیا جائے تو ، کارکردگی کم ہے اور زیادہ گرمی پیدا کرتی ہے۔ اس میں مزید پانی کو ٹھنڈا کرنے والے آلات کو تعمیر میں شامل کرنے کی ضرورت ہے۔
لکیری انڈکشن موٹر کی درخواستیں
لکیری انڈکشن موٹرز کا خصوصی استعمال جیسے ایپلیکیشنز میں پایا جاسکتا ہے
- دھاتی کنویر بیلٹ
- مکینیکل کنٹرولنگ سامان
- تیز رفتار سرکٹ توڑنے والے
- شٹل بوسٹنگ ایپلی کیشنز
مجموعی طور پر ، یہ سب لکیری انڈکشن موٹرز کے تصور کے بارے میں ہے۔ اس مضمون میں لکیری انڈکشن موٹر اصولوں ، ڈیزائن ، کام کرنے ، استعمال ، فوائد اور نقائص کی واضح وضاحت فراہم کی گئی ہے۔ اس کے لئے یہ جاننا مزید ضروری ہے کہ رفتار v / s قطب کی رفتار کیسے ہے لکیری انڈکشن موٹر میں خصوصیات کارکردگی