جب صنعتی اور انجینئرنگ ڈومین میں اضافہ کی بات آتی ہے تو ، موٹروں پر ایک اہم ذمہ داری عائد ہوتی ہے۔ موٹروں کے وسیع استعمال نے طاقت اور کنٹرولنگ ایپلی کیشنز دونوں میں اضافہ کیا ہے۔ موٹروں کو ریگولیٹ کرنے کی اس بڑی شہرت کے ساتھ ، ہر سال کے لئے استعمال میں بھی اضافہ ہوتا جارہا ہے۔ اور اسٹیپر موٹر ایک طرح کی کنٹرول موٹر ہے جو رفتار اور پوزیشن ریگولیشن پر چلتی ہے جس میں رائے لوپ کا کوئی استعمال نہیں ہوتا ہے۔ اس رجحان کو اوپن لوپ کنٹرول موٹر کہا جاتا ہے۔ لہذا ، یہ مضمون اسٹپر موٹر کی ایک قسم کی واضح وضاحت دیتا ہے اور یہ ہے “متغیر ہچکچاہٹ اسٹپر موٹر ”۔ مندرجہ ذیل حصے اس آلہ کے کام کرنے کی وضاحت کرتے ہیں ، اصولی فوائد اور خرابیاں استعمال کرتا ہے۔
متغیر تذبذب اسٹیپر موٹر کیا ہے؟
یہ عام طور پر عمدہ موٹرز ہے۔ جب اسپرپر موٹرز کی دیگر اقسام کے ساتھ موازنہ کیا جائے تو یہ آسان ترین ڈیزائن رکھتا ہے۔ چونکہ روٹر سیکشن غیر مقناطیسی ہے ، اسٹیٹر اور کے درمیان کوئی پرکشش قوت موجود نہیں ہے روٹر . اس کی وجہ سے ، متغیر تذبذب سے متعلق اسٹیپر موٹر کوئی عیب پیدا نہیں کرے گی torque .
متحرک ٹارک کی نسل بہت کم ہے لیکن جب موٹر تیز رفتار نرخوں پر چلتا ہے تو اس میں torque ڈراپ آف ہوتا ہے۔ لہذا ، یہ متغیر تذبذب والی موٹر زیادہ تر درمیانے درجے سے زیادہ کی رفتار کی شرحوں پر لاگو ہوتی ہے۔ ان موٹروں میں شور کی ایک اعلی حد بھی ہوتی ہے ، ایسے منظرناموں کے لئے موزوں ہوتا ہے جہاں شور پر غور نہیں کیا جاتا ہے۔
اصول
بنیادی متغیر تذبذب stepper موٹر کام کرنے کا اصول یہ ہے کہ یہ روٹر ڈیوائس کے متعدد تذبذب والے مقامات پر منحصر ہے۔ جب اسٹیٹر کے مراحل میں وولٹیج سگنل ملتا ہے اور پرجوش ہوجاتا ہے تو ، مقناطیسی میدان کی تخلیق ہوگی جس کے محور کی لکیریں قطبوں کے پار ہوتی ہیں۔
اور اب ، جب روٹر اس راستے میں گھومنے کی کوشش کرتا ہے کہ اسے کم ہچکچاہٹ مل جاتی ہے۔ یہ انقلاب اس سے مطابقت رکھتا ہے کہ اسٹیٹر کے ذریعہ تخلیق کردہ ایک مقناطیسی فیلڈ محور محور کی طرح ہی ہے جو روٹر کے کھمبوں (قطبوں میں سے کسی بھی دو) کو پار کرتا ہے۔
متغیر تذبذب اسٹیپر موٹر تعمیر
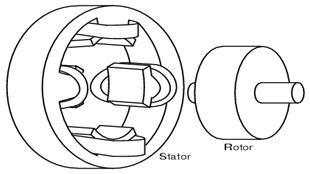
بنیادی طور پر ، یہ آلہ ایک زخمی اسٹیٹر اور کثیر دانت روٹر حصوں پر مشتمل ہے۔ اسٹیٹر ونڈنگ سیلیکن اسٹیل کے احاطے کی ایک صف سے ڈھکے ہوئے ہیں۔ عام طور پر ، یہ تین مراحل کے لئے احاطہ کرتا ہے جو ڈنڈوں کے جوڑے کے بیچ بکھر جاتا ہے۔ لہذا ، اسٹیٹر سیکشن میں ڈنڈوں کی تعداد وہی ہے جو ونڈینگ کیلئے موجود متعدد مراحل کی طرح اسٹیٹر میں آتی ہے۔ نیچے دی گئی تصویر والی تصویر میں ، اسٹیٹر میں 12 اسی طرح جدا ہوا پروجیکشن قطب ہے جہاں ہر قطب کا احاطہ ہوتا ہے

ایک حوصلہ افزائی کنڈلی کے ساتھ. پھر تین مرحلوں کو ایک کا استعمال کرتے ہوئے چالو کیا جاتا ہے ڈی سی ماخذ ٹھوس ریاست سوئچ کی حمایت کے ذریعے. جبکہ روٹر سیکشن میں کوئی سمیٹ نہیں ہے اور یہ ایک ممتاز قطب کی قسم کے طور پر سمجھا جاتا ہے جو سلاٹڈ اسٹیل کے احاطے سے بنا ہوا ہے۔ یہاں ، اسٹیٹر دانت اور روٹر کے متوقع دانت ایک ہی چوڑائی کے ہیں ، جبکہ ان دونوں حصوں میں ایک کھمبے کی تعداد مختلف ہے جو خود سے شروع کرنے کی صلاحیت پیش کرتی ہے اور موٹروں کو دو سمتوں میں گھومنے کی سہولت فراہم کرتی ہے۔
یہاں ، اسٹیٹر اور روٹر کے کھمبے کے مابین تین فیز متغیر تذبذب سے متعلق کھڑی موٹر کے طور پر دیا جاتا ہے
این آر = این ایس ± (این ایس / ایم)
جہاں ‘این ایس‘ اسٹیٹر کے کھمبوں کی تعداد کے مساوی ہے
‘Nr’ روٹر کے کھمبے سے مماثل ہے
ورکنگ منظر نامہ
متغیر تذبذب سٹیپر موٹر ورکنگ تین معاملات پر غور کرکے آسانی سے بیان کی جاسکتی ہے۔ آئیے اس ڈیوائس کے کام کے بارے میں تفصیل سے جانیں۔ مندرجہ ذیل اعداد و شمار پر غور کریں۔
کام کی وضاحت کی گئی ہے کیونکہ تین ونڈینگ ایکس ، وائی ، اور زیڈ ایک سلسلے کی طرح سے جڑے ہوئے ہیں اور وہ تین سوئچ S1 ، S2 ، اور S3 کا استعمال کرتے ہوئے ایک کے بعد ایک میں متحرک ہیں۔
منظر 1
جب بجلی کی فراہمی ایکس ای ایس ایکس کے پار فراہم کی جاتی ہے1، S1 سوئچ کو بند کرکے۔ جیسے کہ XX کے درمیان مقناطیسی کھمبے موجود ہیں1سمیٹ ، مقناطیسی کھمبے کے درمیان پرکشش قوت کی وجہ سے ، روٹر ہچکچاہٹ کی پوزیشن کی ایک کم قیمت کو پورا کرنے کی کوشش کرتا ہے۔ لہذا ، 1 اور 3 روٹر محور XX کے ساتھ سیدھے رہنے کی کوشش کرتے ہیں1قطب محور

کام کرنے کا منظر 1
منظر 2
جب YY کناروں کے پار بجلی کی فراہمی فراہم کی جاتی ہے1، پھر اسٹیٹر کے کھمبے میں مقناطیسی محور میں ترمیم ہوگی۔ اب ، روٹر اتنی کم ہچکچاہٹ سمت کو پورا کرنے کی کوشش کرتا ہے تاکہ روٹر تحریک کو تشکیل دے سکے۔ یہاں ، روٹر کے کھمبے کے 2 اور 4 محور YY کے اتنے قریب ہوجاتے ہیں1سمیٹ. اس سے روٹر گردش پیدا ہوتا ہے اور 2 اور 4 روٹر محور YY کے ساتھ سیدھ میں رہنے کی کوشش کرتے ہیں1قطب محور لہذا ، روٹر تحریک 30 ڈگری تک بڑھ جائے گی۔

متغیر تذبذب سٹیپر موٹر منظر نامہ 2
منظر 3
اسی طرح ، جب زیڈ زی ونڈ ونڈس کو ایس 3 کے ذریعہ ایکس ایکس 1 اور وائی وائی کو منسلک بنا دیا گیا ہے۔ روٹر محور کے مقناطیسی کھمبے اسٹیٹر کے محور کے ساتھ سیدھ میں رہنے کی کوشش کرتے ہیں۔ لہذا ، روٹر تحریک 30 ڈگری کی طرف بڑھ جائے گی ، لہذا وہاں XX سے 60 ڈگری کی کل گھماؤ ہوگا1زیڈ زیڈ ہے1.

ورکنگ منظر نامہ 3
اسی مرحلے میں تین مراحل کی کامیابی کے ساتھ ، موٹر 12 قدموں میں ایک انقلاب کو مکمل کرتی ہے۔ اور روٹر سمت اسٹیٹر مرحلے کو فراہم کی جانے والی سپلائی سیریز پر مبنی ہے۔ پھر ٹورک جنریشن جو آلے پر چلتی ہے اس کا براہ راست تناسب فی مرحلے کے ڈبل کا ہے جو T α ہےدو.
فوائد اور نقصانات
متغیر تذبذب سٹیپر موٹر کے فوائد ہیں:
- ایکسلریشن ریٹ میں اضافہ
- آسانی سے چلنے والا اور سرمایہ کاری مؤثر
- فوری متحرک ردعمل
- جورتا میں ٹارک کا تناسب زیادہ ہے
متغیر تذبذب سٹیپر موٹر کے نقصانات ہیں:
- جب صلاحیت بہت کم ہوتی ہے جب بہت بڑا داخلی بوجھ ہوتا ہے
- آؤٹ پٹ پاور پر کوئی حد ہوگی
یہ سب اس ڈیوائس کے تفصیلی تصور کے بارے میں ہے۔ اس حصے میں متغیر تذبذب سٹیپر موٹر ورکنگ ، استعمال ، ڈیزائن اور آپریشن کے اصول کی وضاحت کی گئی ہے۔ اس کے علاوہ ، یہ بھی جانتے ہیں کہ متغیر تذبذب سٹیپر موٹر کی درخواستیں اور متعدد ڈومینز میں اس کا استعمال ہے۔