پوسٹ میں مائکروکانٹرولر کے بغیر اور خصوصی موٹر ڈرائیور سرکٹس یا آئی سی استعمال کیے بغیر روبوٹ سرکٹ سے بچنے کی ایک آسان رکاوٹ کی وضاحت کی گئی ہے۔ اس خیال کی درخواست جناب فیاض نے کی تھی
ڈیزائن
بنیادی طور پر یہ ایک کی شکل میں ہے چلتی گاڑی جو اپنے راستے میں امکانی رکاوٹوں کا پتہ لگانے اور اس سے بچنے اور اس کی سمت کو مناسب طریقے سے تبدیل کرنے کے قابل ہے تاکہ اس کی حرکت بلا روک ٹوک ، سادہ رہے!
اس طرح یہ آپریشن بغیر دستی یا انسانی مداخلت کے خودکار ہے۔
نام سے پتہ چلتا ہے کہ مائکرو قابو کرنے والے کے بغیر روبوٹ سے بچنے کی راہ میں حائل رکاوٹ کا پیش کردہ خیال ، اس لئے مائکروقابو کرنے والا ملازم نہیں رکھتا ہے اور اسی وجہ سے کسی بھی نئے شوق کو تیار کرنا انتہائی آسان اور موزوں ہے۔
سرکٹ کو ڈیزائن کرتے وقت میں نے محسوس کیا کہ اس اصول کو نافذ کرنے کے لئے کم سے کم رکاوٹوں کے ل sens سینسر ماڈیول کی ضرورت ہوگی ، کیونکہ ایک ہی ماڈیول کا استعمال موٹر کی بے حد حرکت کا سبب بن سکتا ہے اور ہوسکتا ہے کہ ہموار موڑ یا گاڑی کی سمت موڑنے میں مدد نہ ملے۔ ایک آزاد راستہ۔
گاڑی کی موٹر اپ سیٹ سے کافی ملتا جلتا ہے ریموٹ کنٹرول کھلونا کار جس پر میں نے پہلے کی ایک پوسٹ میں تبادلہ خیال کیا تھا۔
مندرجہ ذیل آریھ سسٹم کے ایک ماڈیول کی نمائندگی کرتا ہے ، اور اس ل two گاڑی کے دائیں اور بائیں سمت میں اس طرح کے ماڈیولز کی دو یا ایک جوڑی درکار ہوگی۔
یہ خیال بہت آسان ہے اور بغیر کسی مائکرو قابو رکھنے والے اور خصوصی موٹر ڈرائیور آئی سی کے بغیر کام کرتا ہے۔ اس کا مطلب یہ ہے کہ آپ اسے بغیر کسی قسم کے کوڈنگ کے اور بغیر کسی قسم کے پیچیدہ موٹر ڈرائیور آئی سی ..... کے استعمال کر سکتے ہیں اور سرکٹ آپ کو کسی بھی ڈی سی موٹر کو اس کی طاقت سے قطع نظر استعمال کرنے کی اجازت دیتا ہے ، لہذا گاڑیوں سے گریز کرنے میں بھی بجلی کی اعلی رکاوٹ ہوسکتی ہے۔ اس سرکٹ کا استعمال کرتے ہوئے بنایا گیا ہے جو عام طور پر مالز اور اسی طرح کے خوردہ دکانوں میں استعمال ہوتا ہے۔
سرکٹ ڈایاگرام

آئیے مندرجہ ذیل وضاحت کی مدد سے مذکورہ بالا سرکٹ کو سمجھنے کی کوشش کریں۔
یہ کیسے کام کرتا ہے
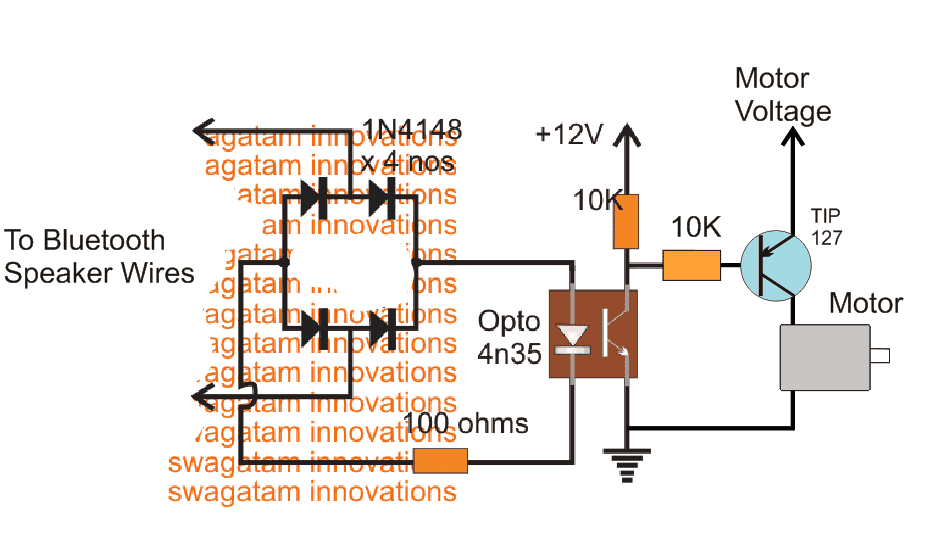
آئی سی 555 آئی آر ٹرانسمیٹر کے طور پر تشکیل دیا گیا ہے اور مستقل 38 کلو ہرٹز فریکوئنسی تیار کرنے کے لئے تیار ہے ، جبکہ ملحقہ ٹرانجسٹرائزڈ سرکٹ وصول کنندہ مرحلے یا آئی آر سینسر مرحلے کے طور پر تشکیل دیا گیا ہے۔
آئیے فرض کریں کہ یہ دائیں طرف کا ماڈیول ہے ، اور فرض کریں کہ یہ ماڈیول اس راستے میں رکاوٹ کا پتہ لگانے والا پہلا ہونا ہے۔
لہذا جیسے ہی کسی رکاوٹ کا پتہ چلا ، 555 آایسی کے ذریعہ تیار کردہ 38 کلو ہرٹز تعدد ملحقہ وصول کنندہ سرکٹ کے سینسر کی طرف جھلکتی ہے۔
وصول کنندہ فوری طور پر اس سے وابستہ ٹرانجسٹروں کو چالو کرتا ہے کہ حتمی ڈرائیور ٹرانجسٹر کو روکنے سے روکتا ہے۔
اس موٹر کو جو اس ٹرانجسٹر کے ذریعہ کنٹرول کیا جاتا ہے اس گاڑی کے بائیں جانب واقع ہونا چاہئے ، جو اس ماڈیول کے مخالف سمت میں ہے ... اسی طرح دائیں طرف واقع موٹر دراصل بائیں جانب ماڈیول کے ذریعہ کنٹرول کی جاتی ہے .
اس کے نتیجے میں ، جب اوپر فرض کیا گیا دائیں ہاتھ کی رکاوٹ کا پتہ لگانے والا ماڈیول چالو ہوتا ہے تو ، یہ بائیں ہاتھ کی موٹر کو روکتا ہے ، جبکہ دائیں طرف کی موٹر کو عام طور پر حرکت میں آنے کی اجازت ہے۔
اس صورتحال کے نتیجے میں گاڑی کو بائیں طرف کا رخ موڑنے پر مجبور کیا جاتا ہے ... اس کا مطلب ہے کہ اب فرض کی گئی بائیں ماڈیول میں مزید رکاوٹوں کا اشارہ ملنا شروع ہوتا ہے اور گاڑی کو جاری موڑ پر مزید آگے بڑھنے پر مجبور کرتا رہتا ہے جب تک کہ یہ مکمل طور پر رکاوٹ سے باز نہ آجائے۔ . ماڈیول اب رکاوٹوں کے اشارے ملنا بند کر دیتا ہے اور گاڑی اپنی نئی راہ پر عام طور پر آگے بڑھنے لگی ہے۔
جب کہ مذکورہ موڑ کا استعمال بائیں بازو کے ماڈیول کو زیادہ سے زیادہ الگ تھلگ اور رکاوٹ سے دور کرنے پر مجبور کیا جاتا ہے تاکہ اس کو طریقہ کار میں مداخلت کرنے کا موقع نہ ملے اور گاڑی کو صاف ستھرا اور ہموار موڑ دیا جاسکے۔
دائیں طرف کے ماڈیول کے سامنے رکاوٹ کو محسوس کرنے کے لئے بائیں جانب ماڈیول میں رکاوٹ محسوس ہونے کے عین مطابق اسی طریقہ کار کو لاگو کیا جاتا ہے ، جس میں گاڑی دائیں طرف کی طرف سخت اور مشکل سے آگے بڑھنے پر مجبور ہوتی ہے۔
ہم ماڈیول میں ایک 'نااہل' سرکٹ مرحلہ بھی دیکھ سکتے ہیں جو بائیں اور دائیں جانب کے ماڈیولز کے پار آپس میں جڑا ہوتا ہے۔ اس مرحلے کو جان بوجھ کر متعارف کرایا گیا ہے کہ یہ یقینی بنائیں کہ دونوں ماڈیول کبھی بھی ایک ساتھ متحرک نہیں ہوتے ہیں۔
لہذا مثال کے طور پر اگر بائیں طرف والا ماڈیول کسی رکاوٹ کا پتہ لگانے والا پہلا بن جاتا ہے تو ، یہ فوری طور پر دائیں جانب کے ماڈیول کو غیر فعال کردیتا ہے اور دائیں اور اس کے برعکس گاڑی کا موڑ شروع کرتا ہے۔
سینسر آئی سی ایک ہوسکتا ہے معیاری TSOP17XX سیریز
مذکورہ بالا سینسر آئی سی کے بارے میں مزید معلومات کے ل you آپ سیکھ سکتے ہیں TSOP1738 IC کو کیسے مربوط کریں
اور موٹر کو گیئر خانوں سے آراستہ کیا جانا چاہئے تاکہ اس حرکت کو اصل میں کنٹرول سطح پر برقرار رکھا جاسکے۔
وہیل سیٹ اپ
بائیں اور دائیں ماڈیول کی مکمل سیٹ اپ اور اس سے وابستہ بجلی کے رابطے کا مشاہدہ نیچے دی گئی شکل میں کیا جاسکتا ہے۔

اپ ڈیٹ
ایک چھوٹی سی سوچ ہمیں بتاتی ہے کہ روبوٹ سرکٹ سے بچنے کے لئے مندرجہ بالا سادہ رکاوٹ بھی ان دونوں کی بجائے ایک ماڈیول استعمال کرکے لاگو ہوسکتی ہے۔
تاہم ، جب بھی کسی رکاوٹ کا پتہ چلتا ہے تو ہر مرتبہ ایک ہی ماڈیول گاڑی کو ایک رخا موڑ انجام دینے کی اجازت دیتا ہے ، لہذا سسٹم کو یا تو گھڑی کی طرف موڑ یا اینٹلوک ڈائیورژن لینے کے لئے تشکیل دیا جاسکتا ہے جس پر منحصر ہوتا ہے کہ موٹر کس عمل کے ل with سرکٹ سے منسلک ہے۔
مندرجہ ذیل تصویر میں ترتیب دی گئی مثال کا تصور کیا جاسکتا ہے:

تاہم ، ایسا لگتا ہے کہ مذکورہ بالا واحد موٹر سیٹ اپ میں ایک مسئلہ ہے۔ اگر فرض کیج the گاین کا بائیں جانب دائیں کونے والے کونے کا سامنا ہو۔ اس سے گاڑی کو اینٹ لاک کی سمت چلنے پر مجبور کردے گا ، یہاں تک کہ اس میں یو ٹرن آجائے ، اور اسی سمت کی طرف پیچھے ہٹنا شروع کردے جہاں سے وہ شروع ہوا تھا۔ یہ ایسی کوئی چیز نہیں ہے جس کی صارف تعریف کرے۔
پچھلا: ایس ایم ڈی مزاحم۔ تعارف اور کام کرنا اگلا: ایکسیلیومیٹر کیسے کام کرتا ہے