ایک پک اور پلیس روبوٹ وہ ہوتا ہے جو کسی چیز کو لینے اور اسے مطلوبہ جگہ پر رکھنے کے لئے استعمال ہوتا ہے۔ یہ افقی ، عمودی اور گھورنی محور میں نقل فراہم کرنے والا ایک بیلناکار روبوٹ ہوسکتا ہے ، دو گھماؤ اور ایک لکیری تحریک ، ایک واضح روبوٹ یا اسکارا روبوٹ (3 عمودی محور روٹری بازو کے ساتھ فکسڈ روبوٹ) فراہم کرنے والا ایک کروی روبوٹ ہوسکتا ہے۔
فوائد
آگے بڑھنے سے پہلے ، آئیے روبوٹ کو منتخب کرنے اور رکھنے کی کچھ وجوہات دیکھتے ہیں:
- وہ تیز تر ہیں اور اپنے انسانی ہم منصبوں کے مقابلہ میں سیکنڈ میں کام کرواسکتے ہیں۔
- وہ لچکدار ہیں اور مناسب ڈیزائن رکھتے ہیں۔
- وہ درست ہیں۔
- وہ کام کرنے والے ماحول کی حفاظت میں اضافہ کرتے ہیں اور در حقیقت کبھی تنگ نہیں ہوتے ہیں۔
ایک اٹھاو ن پلیس روبوٹ کے حصے

ن پلیس روبوٹ منتخب کریں
آئیے دیکھیں کہ اصل میں منتخب اور جگہ کا روبوٹ کیا ہوتا ہے:
- روور کرنے کے لئے : یہ روبوٹ کا مرکزی جسم ہے جس میں سلنڈر یا دائرہ ، جوڑ اور لنکس جیسے متعدد سخت جسم شامل ہیں۔ یہ ایک ہیرا پیلیٹر کے طور پر بھی جانا جاتا ہے۔
- اختتامی اثر : یہ روور کے آخری مشترکہ سے منسلک جسم ہے جو چیزوں کو گرفت یا ہینڈل کرنے کے مقصد کے لئے استعمال ہوتا ہے۔ یہ انسان کے بازو سے مشابہت ہوسکتا ہے۔
- محرکات : وہ روبوٹ کے ڈرائیور ہیں۔ یہ دراصل روبوٹ کو متحرک کرتا ہے۔ یہ سرو موٹر ، اسٹپر موٹر یا نیومیٹک یا ہائیڈرولک سلنڈر جیسے کوئی موٹر ہوسکتی ہے۔
- سینسر: یہ یقینی بنانے کے لئے کہ روبوٹ مجموعی طور پر آسانی سے کام کرتا ہے اس کے لئے وہ داخلی اور خارجی حالت کو سمجھنے کے لئے استعمال ہوتے ہیں۔ سینسر میں ٹچ سینسر ، آئی آر سینسر وغیرہ شامل ہیں۔
- کنٹرولر : یہ سینسر آراء پر مبنی ایکچیوٹرز کو کنٹرول کرنے کے لئے استعمال ہوتا ہے اور اس طرح ہر مشترکہ کی حرکت اور بالآخر اختتام پذیری کی نقل و حرکت کو کنٹرول کرتا ہے۔
ایک بیسک اٹھا ن پلیس روبوٹ کا کام کرنا:
بنیادی کام a روبوٹ کو چنیں اور رکھیں اس کے جوڑ سے ہوتا ہے۔ جوڑ انسانی جوڑ کے مترادف ہوتے ہیں اور روبوٹ میں لگاتار دو سخت جسموں میں شامل ہونے کے لئے استعمال ہوتے ہیں۔ وہ روٹری مشترکہ یا لکیری مشترکہ ہوسکتے ہیں۔ روبوٹ کے کسی بھی لنک میں جوائنٹ شامل کرنے کے ل we ، ہمیں جسم کے اس حصے کے لئے آزادی کی ڈگری اور نقل و حرکت کی ڈگریوں کے بارے میں جاننے کی ضرورت ہے۔ آزادی کی ڈگری جسم کی خطی اور گھماؤ حرکت کو نافذ کرتی ہے اور نقل و حرکت کی ڈگری اس بات کا اشارہ کرتی ہے کہ جسم محور کی تعداد کو منتقل کرسکتا ہے۔

ایک سادہ اٹھاو N جگہ روبوٹ
ایک سادہ چن اور جگہ کا روبوٹ متحرک اڈے پر دو سخت جسموں پر مشتمل ہوتا ہے ، جو روٹری مشترکہ کے ساتھ مل کر جوڑا جاتا ہے۔ ایک روٹری جوائنٹ وہ ہوتا ہے جو محور میں سے کسی ایک کے گرد 360 ڈگری میں گردش فراہم کرتا ہے۔
- نیچے یا اڈے پہیے کے ساتھ منسلک ہوتے ہیں جو لکیری حرکت فراہم کرتے ہیں۔
- 1stسخت جسم فکسڈ ہے اور دوسرے سخت جسم کی حمایت کرتا ہے جس میں آخری اثر فراہم کیا جاتا ہے۔
- 2این ڈیسخت جسم کو تمام 3 محوروں میں نقل و حرکت فراہم کی جاتی ہے اور اس میں 3 ڈگری آزادی ہے۔ یہ 1 سے منسلک ہےstایک گھورنی مشترکہ کے ساتھ جسم.
- کسی بھی اونچائی پر پوزیشن لینے کے ل the ، جز کے تمام اطراف تک پہنچنے کے ل The ، اختتام پذیر کو آزادی کے تمام 6 ڈگری کو ایڈجسٹ کرنا چاہئے۔
مجموعی طور پر ، بنیادی چن اور جگہ کا روبوٹ مندرجہ ذیل کام کرتا ہے:
- اڈے کے نیچے پہیے روبوٹ کو مطلوبہ مقام پر منتقل کرنے میں معاون ہوتے ہیں۔
- سخت اثر والا جسم جس کا اختتام اثر کرنے والا معاون ہوتا ہے اس مقام تک پہنچنے کے لئے موڑ دیتا ہے یا سیدھا ہوتا ہے جہاں اعتراض رکھا جاتا ہے۔
- اختتامی اثر لینے والا مضبوط چیز کے ساتھ چیز کو اٹھا کر مطلوبہ مقام پر رکھتا ہے۔
اب چونکہ ہمیں پک اینڈ پلیس روبوٹ کا ایک مختصر خیال آگیا ہے ، بنیادی سوال یہ ہے کہ واقعتا اس کو کس طرح کنٹرول کیا جاتا ہے۔
اس کے اختتام اثر کی نقل و حرکت کو کنٹرول کرکے ایک سادہ چن اور جگہ کے روبوٹ کو کنٹرول کیا جاسکتا ہے۔ تحریک ہائیڈرولک حرکت کا استعمال کرسکتی ہے ، یعنی روبوٹ کو دباؤ میں ہائیڈرولک سیال کا استعمال کرتے ہوئے ، یا نیومیٹک حرکت کا استعمال ، یعنی میکانی حرکت پیدا کرنے کے لئے دباؤ والی ہوا کا استعمال کرتے ہوئے۔ تاہم سب سے زیادہ موثر طریقہ موٹروں کو مطلوبہ حرکت فراہم کرنے کے لئے استعمال کرنا ہے۔ روبوٹ اور اختتامی اثر پذیری کو مطلوبہ حرکت فراہم کرنے کے لئے موٹروں کو کنٹرول کرنا ہوگا۔
ایک منتخب کریں N جگہ روبوٹ کو کنٹرول کرنے کی مثال
کیپیڈ پر صرف چند بٹنوں کے ذریعہ روبوٹ کو کنٹرول کرنے کے بارے میں کیا خیال ہے؟ ہاں ، یہ ممکن ہے! صرف مطلوبہ بٹن دبانے سے ہم روبوٹ کو کمانڈ منتقل کرسکتے ہیں تاکہ اسے اپنے کام کو حاصل کرنے کے لئے کسی بھی سمت میں منتقل کیا جاسکے۔ مزید برآں یہ آسان وائرلیس مواصلات کا استعمال کرتے ہوئے حاصل کیا جاسکتا ہے۔
آئیے دیکھتے ہیں کہ یہ واقعی کیسے کام کرتا ہے:
ٹرانسمیٹر حصہ مائکرو قابو کرنے والے کے ساتھ انٹرفیس شدہ کیپیڈ پر مشتمل ہوتا ہے۔ اعشاری شکل میں کسی بھی بٹن نمبر کو مائکروکانٹرولر کے ذریعہ 4 ہندسوں کے بائنری میں تبدیل کیا جاتا ہے اور اس کی ایک بندرگاہ میں متوازی آؤٹ پٹ انکوڈر پر لاگو ہوتا ہے۔ انکوڈر اس متوازی ڈیٹا کو سیریل ڈیٹا میں تبدیل کرتا ہے اور اس کو ٹرانسمیٹر کو کھلایا جاتا ہے ، سیریل ڈیٹا منتقل کرنے کے لئے اینٹینا لگا ہوتا ہے۔

بلاک ڈایاگرام ایک اٹھاو ن پلیس روبوٹ کا ٹرانسمیٹر دکھا رہا ہے
وصول کنندگان میں ایک ڈویکڈر ہوتا ہے جو مائکروکانٹرولر سے انٹرفیس ہوتا ہے۔ کوٹواچک سیریل فارمیٹ میں موصول کمانڈ کو متوازی شکل میں تبدیل کرتا ہے اور یہ ڈیٹا مائکروکانٹرولر کو دیتا ہے۔ اس کمانڈ کی بنیاد پر مائکروکانٹرولر موٹر ان ڈرائیوروں کو متعلقہ موٹرز چلانے کے ل the مناسب ان پٹ سگنل بھیجتا ہے۔

بلاک ڈایاگرام ایک اٹھاو ن پلیس روبوٹ کا وصول کنندہ دکھا رہا ہے
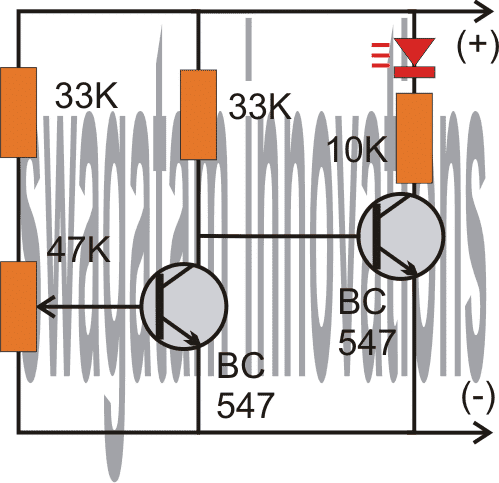
سسٹم میں پورے دو روبوٹ کو حرکت مہیا کرنے کے لئے دو موٹریں اور بازو کی تحریک فراہم کرنے کے لئے دو دیگر موٹریں شامل ہیں۔ کسی بھی چیز کو مؤثر طریقے سے ہینڈل کرنے کے ل The ، اس پر اثر ڈالنے کے ل proper مقصد پر مناسب دباؤ لگانے کے لئے اختتامی اثر یا گرفت کو کنٹرول کرنے کی ضرورت ہے۔ نرم گرفت . مناسب کمانڈ کے ذریعہ بازو موٹروں کو قابو کرکے یقینی بنایا گیا ہے۔ بازو موٹروں سے حاصل ہونے والی پیداوار 10 اوہامس / 2W ریزٹر سے منسلک ہوتی ہے اور موٹر اوور بوجھ یا بند حالت کے وقت ، ریزٹر کے پار ایک ہائی وولٹیج تیار ہوتی ہے ، جس کی وجہ سے اوپٹواسولٹر کی پیداوار اور رکاوٹ ہوتی ہے ایک pnp ٹرانجسٹر کے ذریعے optoisolator آؤٹ پٹ سے منسلک مائکروکانٹرولر کی پن کو منطق سے کم سگنل ملتا ہے ، جو گرفت کے دیگر تمام کاموں کو روکتا ہے۔
اس طرح سادہ آریف مواصلات کے ذریعہ ، ہم واقعی چن اور جگہ والے روبوٹ کو کنٹرول کرسکتے ہیں۔
روبوٹ کو منتخب کریں اور استعمال کریں:
- دفاعی درخواستیں : اس کی نگرانی کے لئے اور بم جیسے نقصان دہ چیزوں کو لینے اور محفوظ طریقے سے پھیلا کر استعمال کرنے کے لئے بھی استعمال کیا جاسکتا ہے۔
- صنعتی ایپلی کیشنز : یہ روبوٹ مینوفیکچرنگ میں ، مطلوبہ حصوں کو چننے اور مشینری فکسچر کو مکمل کرنے کے لئے صحیح پوزیشن میں رکھنے کے لئے استعمال ہوتے ہیں۔ یہ کنویر بیلٹ پر اشیاء رکھنے کے ساتھ ساتھ کنویر بیلٹ سے عیب دار مصنوعات لینے کے لئے بھی استعمال کیا جاسکتا ہے۔
- طبی درخواستیں : یہ روبوٹ مختلف سرجیکل آپریشنوں میں استعمال ہوسکتے ہیں جیسے مشترکہ متبادل آپریشن ، آرتھوپیڈک اور داخلی سرجری کی کارروائیوں میں۔ یہ آپریشن زیادہ درستگی اور درستگی کے ساتھ انجام دیتا ہے۔
ان ایپلی کیشنز کے علاوہ ، یہ روبوٹ بنی نوع انسان کے لئے موزوں مختلف دوسری ایپلی کیشنز میں بھی استعمال ہوسکتے ہیں۔
اب سوال یہ ہے کہ وہ دن کتنا دور ہے جب انسانوں کے لئے روبوٹ پوری طرح سے آسانی پیدا کردیں گے؟