اس وقت ، ڈرونز بہت سے شعبوں میں بہت مشہور ہوچکا ہے جیسے میپنگ ، ریسنگ ، لاجسٹکس ، سروے اور بہت کچھ۔ یہ ایک بغیر پائلٹ فضائی گاڑی یا بغیر پائلٹ ہوائی جہاز کا نظام ہے ، جو ایک اڑن روبوٹ ہے جو خود مختار یا دور سے کنٹرول شدہ اڑ سکتا ہے۔ اس طرح ، یہ ڈرون سافٹ ویئر کے زیر کنٹرول پرواز کے ساتھ سرایت کرتے ہیں جو ایک کے ساتھ مل کر کام کرتا ہے عالمی پوزیشننگ سسٹم اور سینسر۔ مارکیٹ میں مختلف قسم کے ڈرون دستیاب ہیں جن میں مختلف سائز کے ساتھ استعمال کیا جاتا ہے اور مختلف مقاصد کے لئے استعمال کیا جاتا ہے جیسے ملٹی روٹر ، سنگل روٹر ، فکسڈ وائرنگ ، اور فکسڈ ونگ ہائبرڈ وی ٹی او ایل۔ تاہم ، ان کے وسیع پیمانے پر استعمال کی وجہ سے ملٹی روٹر ڈرون کلیدی کردار ادا کرتے ہیں۔ یہ مضمون ایک پر تفصیل سے بیان کرتا ہے ملٹیروٹر ڈرون ، ان کے کام ، اور ان کی درخواستیں۔
روٹر ڈرون کیا ہے؟
ایک ملٹی روٹر ڈرون ایک بغیر پائلٹ فضائی گاڑی یا ایک ملٹی کاپٹر ہے جو عمودی ٹیک آف ، منڈلانے اور لینڈنگ کی صلاحیتوں کی اجازت دے کر لفٹ اور پروپولشن پیدا کرنے کے لئے فکسڈ پچ گھومنے والے بلیڈ کے ساتھ مختلف روٹرز کا استعمال کرتا ہے۔ لہذا ، روٹر زاویہ طے کیا جاسکتا ہے اور تبدیل نہیں ہوسکتا ہے ، ہیلی کاپٹر کی طرح۔ مختلف روٹرز کے مابین نسبتا speed رفتار میں ترمیم کرکے ، طیارے کی رفتار کو کنٹرول کرنے کے لئے پروپلشن ٹارک فورس میں ترمیم کی جاسکتی ہے۔
ملٹی روٹر کافی آسان اور مستقل ہے ، اور طیارے کے مقابلے میں ملٹی روٹر طیارہ کی ظاہری شکل بہت کم ہے۔ اس طرح ، یہ فرصت کے استعمال اور صنعت کے کام کے لئے موزوں ہے۔ اس طرح ، ملٹی روٹر ڈرون آپریشن آسان ہے اور رن وے کے علاوہ ، عمودی طور پر اتار سکتا ہے۔ لہذا ، اس کی وشوسنییتا بنیادی طور پر برش لیس موٹروں پر منحصر ہے ، اس طرح ، اس میں زیادہ وشوسنییتا ہے۔
اس کے ساتھ ہی ، سادہ آپریشن اور مضبوط استحکام کے ساتھ بہت سے زرعی اور صنعتی شعبوں میں ملٹی روٹر یو اے وی بڑے پیمانے پر استعمال ہوئے ہیں۔ لہذا ، یہ ڈرونز مندرجہ بالا دو روٹرز کی خصوصیت رکھتے ہیں ، جس میں معیاری تشکیلات جیسے ٹرائکوپٹر (تین) ، کواڈکوپٹر (چار) ، ہیکساکوپٹر (چھ) ، یا آکٹکوپٹر (آٹھ) روٹرز شامل ہیں۔
ملٹیروٹر ڈرون کام کر رہا ہے
ملٹی روٹر ڈرون ایک سے زیادہ روٹرز ، عام طور پر 4 ، 6 ، یا 8 کا استعمال کرکے کام کرتے ہیں تاکہ انفرادی روٹرز کی رفتار کو تبدیل کرکے لفٹ اور کنٹرول فلائٹ تیار کی جاسکے ، جیسے چڑھتے ، منڈلانے ، مڑنے اور اترتے ہوئے پینتریبازی کی اجازت دے کر۔
ہر روٹر ہوا کو نیچے دھکیلنے کے لئے گھومتا ہے ، ایک اوپر کی رد عمل کی قوت بناتا ہے جو ڈرون کو اٹھاتا ہے۔ روٹر کی رفتار کو یکساں طور پر ایڈجسٹ کرکے ، ڈرون دوسری صورت میں چڑھ سکتا ہے۔ جب بھی روٹر کا مشترکہ زور ڈرون کے وزن کو متوازن کرتا ہے ، تو یہ تیر سکتا ہے۔
سامنے والے روٹرز کو سامنے والے گردشوں کے مقابلے میں تیز تر بناتے ہوئے ، ڈرون آگے بڑھتا ہے ، اور اس کے برعکس۔ اس طرح ، دوسرے کے مقابلے میں ایک طرف کے گردشوں کو تیز تر بنانا ، ڈرون اس سمت میں گھومتا ہے۔ اخترن مخالف روٹرز کو دوسروں کے مقابلے میں تیز تر بنا کر ، یہ ڈرون اسی سمت میں بدل جاتا ہے۔
لہذا گھومنے والے گھومنے والے ٹارک پیدا کرتے ہیں ، جو کچھ روٹرز گھڑی کی سمت میں مڑ کر ملٹی روٹر ڈرون کے اندر مقابلہ کیا جاتا ہے اور دوسرے گھڑی کی سمت میں مڑ جاتے ہیں ، جو پورے ٹارک کو منسوخ کردیتے ہیں۔ ڈرونز مستقل مزاجی کو برقرار رکھنے اور درست ہتھکنڈوں کی اجازت دے کر ہوا میں اپنا راستہ تلاش کرنے کے لئے سینسر ، کمپیوٹرائزڈ پوزیشننگ سسٹم ، اور جیروسکوپز کا استعمال کرتے ہیں۔
ملٹیروٹر ڈرون کی اقسام
ملٹی روٹر ڈرون مختلف اقسام میں دستیاب ہیں اور مختلف ایپلی کیشنز میں استعمال کیا جاتا ہے جس میں چستی ، پرواز کے وقت ، پے لوڈ کی گنجائش اور استحکام میں کارکردگی کی مختلف حالتوں کے ساتھ استعمال ہوتا ہے۔
trotor
ٹراموٹر ڈرون تین روٹرز کے ساتھ بونسی پیدا کرنے کے لئے بنایا گیا ہے ، جو نقل و حرکت اور کنٹرول کے لئے استعمال ہوتا ہے۔ لہذا بازو کا فاصلہ عام طور پر 120 ڈگری ہوتا ہے اور عام طور پر کبھی کبھی ٹی شکل میں ایک ہی وقت میں y شکل میں ہوتا ہے۔ اس قسم کے ڈرون کے فوائد کم لاگت ، لچک اور اس کی روشنی کے سائز ہیں کیونکہ اس میں صرف تین روٹرز کی ضرورت ہوتی ہے ، جو کافی کم لاگت کی ترتیب ہے۔ بیک وقت ، موٹر نمبروں کی وجہ سے اس میں کم لفٹنگ طاقت بھی ہوسکتی ہے۔

کواڈروٹر
یہ X اور H فارموں میں دستیاب ملٹی کوپٹر کی سب سے مشہور اور عام قسم ہے۔ لہذا ، چار موٹریں ایک سڈول فریم پر رکھی جاتی ہیں ، اور ہر بازو عام طور پر X4 ترتیب کے اندر 90 ڈگری کے علاوہ ہوتا ہے۔ دو موٹریں گھڑی کی سمت میں بدل جاتی ہیں ، جبکہ باقی دو متوازن رہنے کے لئے مخالف قوتوں کو تیار کرنے کے لئے گھڑی کی سمت گھڑی کی سمت میں گھومتے ہیں۔ اس طرح ، یہ استحکام ، پرواز کے وقت اور قیمت کے لئے ایک مثالی کارکردگی حاصل کرتا ہے۔

ہیکساکوپٹر
ہیکساکوپٹر کو ایک سڈول فریم پر رکھا جاتا ہے ، اور ہر بازو عام طور پر 60 ڈگری ہوتا ہے۔ ہیکساڈکوپٹر میں استحکام اور طاقت کو بڑھانے کے لئے کواڈروٹر سے زیادہ موٹریں شامل ہیں۔ یہ ڈرون اعلی فالتو پن مداخلت کے وقت کو بھی بہتر بنا سکتا ہے تاکہ یہاں تک کہ اگر ڈرون کی موٹر پرواز میں ناکام ہوجائے تو ، یہ ہوا اور زمین میں محفوظ طریقے سے صحیح طریقے سے کام کرسکتا ہے۔ لیکن ، موٹرز بجلی کی زیادہ کھپت ہوگی ، اس طرح ، پرواز کا وقت کم ہوجائے گا۔ لہذا یہ ایک کواڈ کاپٹر کی طرح بھی ہوسکتا ہے جہاں تین موٹریں گھڑی کی سمت میں مڑتی ہیں اور باقی تینوں نے توازن برقرار رکھنے کے لئے ریورس فورسز تیار کرنے کے لئے سی سی ڈبلیو کو موڑ دیا ہے۔

آکٹکوپٹر
آکٹکوپٹر ڈرون میں عام طور پر آٹھ شامل ہیں روٹرز مضبوط استحکام اور طاقت کے ساتھ۔ یہ تیز ہوا کے ساتھ زیادہ سے زیادہ پے لوڈ لیتا ہے مزاحمت . یہ ڈرون اپ گریڈ شدہ کواڈروٹر اور ہیکساڈکوپٹر کی طرح لگتا ہے۔ یہ اکثر پیشہ ورانہ یا فلمی مقاصد کے لئے استعمال ہوتے ہیں اور انہیں بھاری لینس اور کیمروں کے ساتھ رکھا جاسکتا ہے۔ اس کی توانائی کی کھپت تیز ہے ، اور موٹروں کی تعداد میں اضافے کی وجہ سے ڈرون فریم کا سائز بڑا ہے۔

کوکسیئل ملٹی روٹر ڈرون
یہ ایک خاص قسم کا ملٹی روٹر ڈرون ہے جسے سماکشیی ایکس 8 ڈرون کہا جاتا ہے ، جو چار بازوؤں پر بندوبست شدہ آٹھ موٹروں کا استعمال کرتا ہے۔ اسے زیادہ طاقت اور کم جگہ کے ساتھ اپ گریڈ کیا جاسکتا ہے۔ اس میں اسی طرح کی گردش محور کے ساتھ مرتکز محوروں پر واقع روٹرز کا ایک سیٹ شامل ہے لیکن الٹ سمتوں میں گھومنا۔ ہمارا پروڈکٹ MX860 سماکشیی X8 ڈرون فریم کو اپناتا ہے جو چھوٹے سائز اور بڑی پے لوڈ کی خصوصیات کی عکاسی کرتا ہے۔

ملٹیروٹر ڈرون اجزاء
ایک ملٹی روٹر ڈرون مختلف کے ساتھ بنایا گیا ہے اجزاء ، جس میں موٹرز ، فریم ، پروپیلرز ، الیکٹرانک اسپیڈ کنٹرولرز ، فلائٹ کنٹرولرز ، بیٹری اور ایک ریموٹ کنٹرول سسٹم شامل ہیں ، جن پر ذیل میں تبادلہ خیال کیا گیا ہے۔

فریم
ڈرون کا فریم ریڑھ کی ہڈی کی طرح کام کرتا ہے ، جو بنیادی طور پر دوسرے تمام اجزاء کے لئے بڑھتے ہوئے پوائنٹس مہیا کرتا ہے۔ یہ خاص طور پر اعلی طاقت اور ہلکے وزن والے مواد جیسے ایلومینیم کھوٹ یا کاربن فائبر کے ساتھ بنایا گیا ہے۔ اس کا ڈیزائن ڈرون کے مجموعی وزن ، استحکام اور سائز کو متاثر کرتا ہے۔
موٹرز
اس ڈرون کی موٹریں بجلی کی فراہمی اور لفٹ اور زور پیدا کرکے پروپیلرز کو گھومنے میں مدد کرتی ہیں۔ یہ ڈرون عام طور پر استعمال کرتے ہیں BLDC (برش لیس DC) موٹرز وشوسنییتا اور کارکردگی کے لئے۔ موٹروں کی قسم اور تعداد بنیادی طور پر ڈرون کی ترتیب پر منحصر ہوتی ہے ، جیسے ہیکساکاپٹر یا کواڈکوپٹر۔
پروپیلرز
پروپیلرز ڈرون کی موٹروں سے جڑے ہوئے ہیں تاکہ ڈرون کو اڑنے دے کر لفٹ اور زور پیدا کیا جاسکے۔ لہذا پروپیلرز کی شکل اور سائز بنیادی طور پر ڈرون کی رفتار ، لفٹ اور تدبیر کو متاثر کرتی ہے۔ پروپیلر مواد کاربن فائبر ، پلاسٹک ، یا دیگر کمپوزٹ ہیں ، بنیادی طور پر ڈرون کے مطلوبہ استعمال پر منحصر ہیں۔
فلائٹ کنٹرولر
فلائٹ کنٹرولر ملٹی روٹر ڈرون کے دماغ کی طرح کام کرتا ہے ، جو موٹر پر قابو پانے کے لئے سینسروں سے معلومات پر کارروائی کرتا ہے۔ لہذا ، یہ ریموٹ کنٹرول سے کمانڈز پر عملدرآمد کرنے کے لئے اونچائی کو برقرار رکھنے کے لئے پرواز کے اندر ملٹی روٹر ڈرون کو مستحکم کرنے کا ذمہ دار ہے۔ ان کنٹرولرز میں عام طور پر مختلف قسم کے سینسر شامل ہوتے ہیں جیسے ایکسلرومیٹرز ، جی پی ایس ماڈیولز ، گائروسکوپز وغیرہ۔
الیکٹرانک اسپیڈ کنٹرولرز
الیکٹرانک اسپیڈ کنٹرولرز ڈرون کی نقل و حرکت پر درست کنٹرول کو یقینی بناتے ہوئے موٹروں کی سمت اور رفتار کو تبدیل کرتے ہیں۔ ہر موٹر میں عام طور پر اپنا الیکٹرانک اسپیڈ کنٹرول شامل ہوتا ہے ، ورنہ ایک ملٹی چینل ESC بیک وقت کئی موٹروں پر قابو پاسکتا ہے۔
بیٹری
ڈرون کی بیٹری تمام اجزاء جیسے موٹرز ، سینسر ، فلائٹ کنٹرولر وغیرہ کو بجلی فراہم کرتی ہے۔ لہذا ، بیٹری کی گنجائش ڈرون کے پرواز کے وقت کا فیصلہ کرتی ہے ، اور مختلف قسم کی بیٹریاں مختلف ایکٹ کی خصوصیات مہیا کرتی ہیں۔
ریموٹ کنٹرول سسٹم
ریموٹ کنٹرول سسٹم آپریٹر کو اپنی پرواز کے راستے ، رفتار اور اونچائی کو کنٹرول کرکے ڈرون کو ہدایات بھیجنے کی اجازت دیتا ہے۔ ریموٹ کنٹرول میں عام طور پر ایک ٹرانسمیٹر اور وصول کنندہ شامل ہوتا ہے ، جو ڈرون کے ساتھ وائرلیس سے بات چیت کرتا ہے۔
کچھ دوسرے اجزاء
ملٹی روٹر ڈرون کے کچھ دوسرے اجزاء میں لینڈنگ گیئر ، ایک جیمبل ، کیمرہ یا سینسر ، پروپیلرز ، ایک جی پی ایس شامل ہیں اینٹینا ، وغیرہ۔
- لینڈنگ گیئر ڈرون ٹیک آف اور لینڈنگ کے لئے مستحکم مدد فراہم کرتا ہے۔
- ایک جیمبل ایک مکینیکل استحکام کا نظام ہے جس میں کیمرا یا مختلف سینسر ہوتے ہیں جو ڈرون کی نقل و حرکت کے باوجود انہیں سطح پر رہنے کی اجازت دیتے ہیں۔
- کیمرے یا سینسر ویڈیوز ، ڈیٹا ، یا تصاویر پر قبضہ کرنے کے لئے استعمال ہوتے ہیں۔
- اس ڈرون کا GPS اینٹینا عین مطابق پوزیشننگ اور نیویگیشن کے لئے استعمال ہوتا ہے۔
فکسڈ ونگ بمقابلہ ملٹیروٹر ڈرون
فکسڈ ونگ بمقابلہ ملٹیروٹر ڈرون کے درمیان فرق ذیل میں تبادلہ خیال کیا گیا ہے۔
| فکسڈ ونگ ڈرون | ملٹیروٹر ڈرون |
| فکسڈ ونگ ڈرون ہوائی جہاز کی طرح نظر آتے ہیں اور موثر اور طویل فاصلے پر پروازوں کو چالو کرکے لفٹ اور پروپولسن کے لئے پروں کا استعمال کرتے ہیں۔ | ملٹیروٹر ڈرون ہیلی کاپٹروں کی طرح نظر آتے ہیں اور عمودی لفٹ اور منڈلانے کی صلاحیتوں کے ل multiple ایک سے زیادہ روٹرز کا استعمال کرتے ہیں ، جو انہیں قریبی حد ، درست کاموں کے ل appropriate مناسب بناتے ہیں۔ |
| فکسڈ ونگ ڈرون کی حد 80 میل کے قریب ہے۔ | ملٹی روٹر ڈرونز کی حد 10-15 کلومیٹر کی ہے |
| یہ ڈرون بڑے علاقے کی کوریج ، لمبی رینج مشنوں اور رفتار کے لئے استعمال ہوتے ہیں۔ | ملٹیروٹر ڈرون کو تفصیلی معائنہ ، تدبیر اور کاموں کے لئے استعمال کیا جاتا ہے جس میں عمودی ٹیک آف/لینڈنگ یا منڈنگ کی ضرورت ہوتی ہے۔ |
| اسے اڑنے کے لئے تربیت کی ضرورت ہے۔ | کنٹرول اور پینتریبازی کرنا آسان ہے۔ |
| مقررہ پوزیشن کو برقرار رکھنے سے قاصر ہے۔ | یہ ڈرون منڈلا سکتا ہے۔ |
| یہ ڈرون افقی طور پر اڑ سکتا ہے۔ | یہ افقی اور عمودی طور پر اڑ سکتا ہے۔ |
| اس کا سائز کم کمپیکٹ ہے۔ | یہ ڈرون زیادہ کمپیکٹ ہے۔ |
| یہ مہنگا ہے۔ | یہ اکثر کم لاگت آتی ہے۔ |
| اس ڈرون کو زیادہ جگہ کی ضرورت ہے اور اس کی اترنا مشکل ہے۔ | یہ ڈرون کسی نامزد جگہ پر اتر سکتا ہے۔ |
| اس کا طویل وقت ہے۔ | اس کا اڑان کا وقت محدود ہے۔ |
| اس ڈرون میں بھاری پے لوڈ ہوتے ہیں۔ | یہ چھوٹے پے لوڈ لے سکتا ہے۔ |
| اس کی ہوا کا استحکام زیادہ ہے۔ | اس کی ہوا کا استحکام کم ہے۔ |
ملٹیروٹر ڈرون کی ناکامی
ملٹیروٹر ڈرون کی ناکامی مختلف ذرائع جیسے پروپیلر نقصان ، موٹر کی ناکامی اور کنٹرول سسٹم کی دشواریوں کی وجہ سے ہوسکتی ہے۔
- پروپیلر کی ناکامی کثرت سے کسی حد تک لینڈنگ یا تصادم کی وجہ سے ہوسکتی ہے۔ اس طرح ، یہ بلیڈ کو نقصان ، استحکام کا اثر اور کنٹرول کا سبب بن سکتا ہے۔
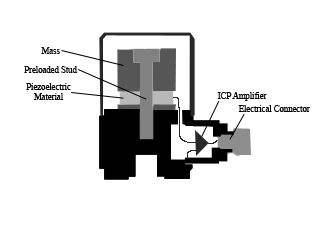
- موٹر کی ناکامی کو کچھ طریقوں جیسے پیزو الیکٹرک سینسر کے ساتھ دیکھا جاسکتا ہے ، جس سے اس طرح کے خرابی کے اثر کو پہچاننے اور کم کرنے میں مدد ملتی ہے۔
- کنٹرول سسٹم کی ناکامی غیر متوازن پرواز کا باعث بن سکتی ہے ، جس سے مضبوط غلطی روادار نظام کی ضرورت کو اجاگر کیا جاسکتا ہے۔
دوسرے عوامل
ملٹیروٹر ڈرون کے دوسرے عوامل میں بنیادی طور پر مندرجہ ذیل شامل ہیں۔
- ماحولیاتی حالات جیسے بارش ، موسمی حالات اور تیز ہوا میں ڈرون کی ناکامیوں کی بھی بنیادی وجہ ہوسکتی ہے۔
- آپریٹر کی غلطیاں جیسے نامناسب ہینڈلنگ اور سمت تلاش کرنا بھی تباہی کا باعث بن سکتا ہے۔
ڈرون کی ناکامیوں سے خطاب کیا
- ریئل ٹائم فالٹ کا پتہ لگانے کے نظام پر عمل درآمد ، جیسے IMU ڈیٹا اور مشین لرننگ الگورتھم کو استعمال کرنا ، قبل از وقت انتباہ کے لئے بنیادی حیثیت رکھتا ہے۔
- کنٹرول سسٹم کی ترقی موٹر خرابی یا دیگر مختلف غلطیوں کی ادائیگی کر سکتی ہے ، جو محفوظ لینڈنگ کی اجازت دیتی ہے بصورت دیگر ہنگامی تدبیریں۔
- فلائٹ کنٹرولرز یا ایک سے زیادہ موٹرز جیسے بے کار اجزاء کا استعمال حفاظت اور وشوسنییتا کو بہتر بنا سکتا ہے۔
- ناکامیوں سے بچنے کے لئے باقاعدگی سے دیکھ بھال اور ڈرون اجزاء کا معائنہ ضروری ہے۔
فوائد اور نقصانات
ملٹی روٹر ڈرون کے فوائد مندرجہ ذیل شامل کریں۔
- ملٹی روٹر ڈرون عین مطابق نقل و حرکت اور کنٹرول کے ساتھ سخت جگہوں پر کھڑے ہیں ، یہاں تک کہ تیز حالات میں بھی۔
- اس کا ڈیزائن اور اس کی مدد سے فلائٹ ٹکنالوجی کو قصر کیا گیا۔
- یہ خصوصی لانچنگ آلات اور رن وے کی ضرورت کو ختم کرکے عمودی طور پر اتار سکتے ہیں اور اتر سکتے ہیں۔
- یہ ڈرون جگہ پر منڈلا سکتے ہیں ، کئی سمتوں میں اڑ سکتے ہیں ، اور پیچیدہ فضائی مشقیں انجام دے سکتے ہیں۔
- فکسڈ ونگ ڈرون کے مقابلے میں یہ ڈرون زیادہ سستی ہیں۔
- بہت سے ملٹیروٹر ڈرون پورٹیبل اور کمپیکٹ ہیں۔
- ان میں خصوصی سینسر اور سازوسامان ہوسکتے ہیں۔
- وہ مختلف شعبوں میں لاگو ہیں۔
- اس ڈرون کے متعدد روٹر ڈرون کو اڑان بھرنے کی اجازت دے کر فالتو پن فراہم کرتے ہیں یہاں تک کہ اگر کم سے کم ایک موٹر ناکام ہوجاتی ہے۔
ملٹی روٹر ڈرون کے نقصانات مندرجہ ذیل شامل کریں۔
- ملٹی روٹر ڈرونز کی رفتار اور برداشت محدود ہے ، جو انہیں طویل مدت کی نگرانی ، بڑے پیمانے پر فضائی نقشہ سازی ، لمبی دوری کے معائنہ وغیرہ کے لئے نامناسب بنا دیتا ہے۔
- وہ بہت ناکارہ ہیں اور کشش ثقل سے لڑنے اور انہیں ہوا میں برقرار رکھنے کے لئے بہت زیادہ توانائی کی ضرورت ہے۔
- یہ ہلکا پھلکا کیمرا پے لوڈ لے کر موجودہ بیٹری ٹکنالوجی کے ساتھ تقریبا 20 سے 30 منٹ تک محدود ہے۔
- ملٹیروٹر ڈرونز میں دوسری قسم کے ڈرون کے مقابلے میں کم رفتار اور حد اور پرواز کا محدود وقت ہوتا ہے۔
- یہ ہوا کے لئے حساس ہیں ، جو طویل فاصلے یا بڑے پیمانے پر مشنوں کے ل their ان کی مناسبیت کو متاثر کرتے ہیں۔
ملٹیروٹر ڈرون ایپلی کیشنز
ملٹی روٹر ڈرون کی درخواستیں مندرجہ ذیل شامل کریں۔
- ملٹی روٹر ڈرون ایک خصوصی فضائی نقطہ نظر سے اعلی معیار کی تصاویر اور ویڈیوز پر قبضہ کرتے ہیں۔
- وہ حفاظت کے مقاصد کے لئے اصل وقت کے بصری اعداد و شمار فراہم کرنے کے لئے نقل و حرکت اور علاقوں کی نگرانی اور ٹریک کرتے ہیں۔
- یہ مختلف سے لیس ہیں سینسر اس سے ماڈلز کے لئے تفصیلی جغرافیائی معلومات حاصل ہوتی ہیں ، نقشے تیار کرتے ہیں اور مختلف شعبوں میں ٹپوگرافک سروے کرتے ہیں۔
- وہ اخراجات اور خطرات کو کم کرنے کے لئے بجلی کی لائنوں ، پلوں ، اور بنیادی ڈھانچے کے معائنے کو قابل بناتے ہوئے مشکل سے پہنچنے والے علاقوں تک رسائی حاصل کرسکتے ہیں۔
- ان کا استعمال کیڑے مار دوا اور کھاد کے چھڑکنے ، زرعی شعبوں میں زمین کا سروے ، اور فصلوں کی نگرانی جیسے کاموں کے لئے کیا جاسکتا ہے ،
- یہ ڈرون تباہی کے علاقوں کا اندازہ کرنے یا لاپتہ افراد کا پتہ لگانے کے لئے قابل قدر ہیں۔
- محققین اسے متعدد سائنسی مقاصد جیسے ارضیاتی سروے ، حیاتیاتی تحقیق ، اور ماحولیاتی مطالعات کے لئے استعمال کرتے ہیں۔
اس طرح ، یہ ایک جائزہ ہے ملٹی روٹر ڈرون ، ان کا کام ، اور ان کی درخواستیں۔ لہذا ملٹی روٹر ڈرون کی مثالیں یہ ہیں: ٹرائی کوپٹر تین روٹر استعمال کرتے ہیں۔ کواڈ کوپٹر چار روٹرز استعمال کرتے ہیں ، ہیکسا کوپٹر چھ روٹر استعمال کرتے ہیں ، اور آکٹو کوپٹر آٹھ روٹر استعمال کرتے ہیں۔ ان میں ، کواڈکوپٹر ڈرون ایک بہت ہی مشہور قسم کا ڈرون ہے۔ اس طرح ، آپ کے لئے ایک سوال یہ ہے: ڈرون کیا ہے؟